Create Successful ADAS/AD Development Solutions by Seamlessly Integrating Virtual Environment and a Physical Unit Under Test
- Expert Article
AVL recently announced that the first AVL DRIVINGCUBE™ in the United States was operational at the Clemson University International Center for Automotive Research (CU-ICAR).
The DRIVINGCUBE provides a new testing environment for different use cases combining simulation, a ready-to-drive vehicle on a chassis dynamometer or powertrain testbed and additional hardware for sensor stimulation and steering force emulation. This allows for reliable and efficient validation and optimization of Advanced Driver Assistance Systems (ADAS) and Autonomous Driving (AD) functions at the vehicle level. The Vehicle-in-the-Loop (ViL) solution speeds up the validation and approval process of ADAS/AD functions.
Please refer to this this article for an overview of the AVL DRIVINGCUBE
Today, we will take a closer look at one of the key software components that enables seamless integration of the virtual environment with the physical unit under test: AVL Model.CONNECTTM.
Model.CONNECT is AVL’s open model integration and co-simulation platform that connects virtual and real components into one functional prototype and can be used across a multitude of domains and applications.
The Challenge
A key to mastering new development tasks is understanding the whole system early in the process and using advanced simulation techniques during the development and testing phase.
To efficiently manage development tasks for complex systems such as ADAS/AD, it is important to realize that there are multiple hardware and software components that may be developed in-house or come from different suppliers/vendors. Integrating those hardware and software components can be a major challenge. Questions like these may come up:
• How do you integrate hardware components with simulation models?
• How do you link component models into one virtual prototype?
• How do you couple and synchronize multiple dependent systems that require performance?
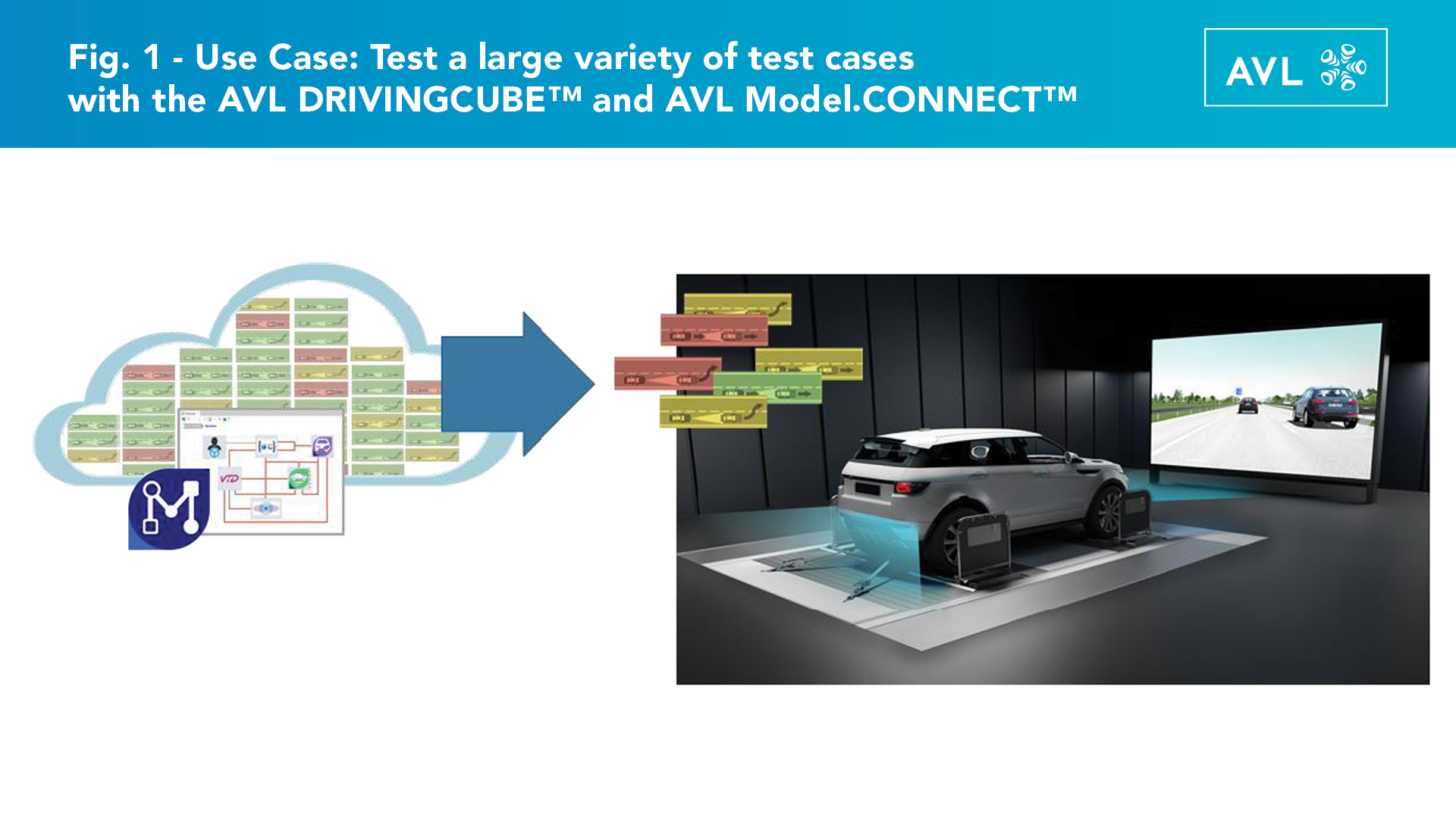
The implementation of ADAS/AD features in vehicles is becoming increasingly common due to the safety benefits they provide, and more complex ADAS/AD features with higher level of autonomy are being developed. These features require substantially more testing to meet the regulations and standards (please see Fig. 1 in the Gallery at the bottom of the article).
Model.CONNECT
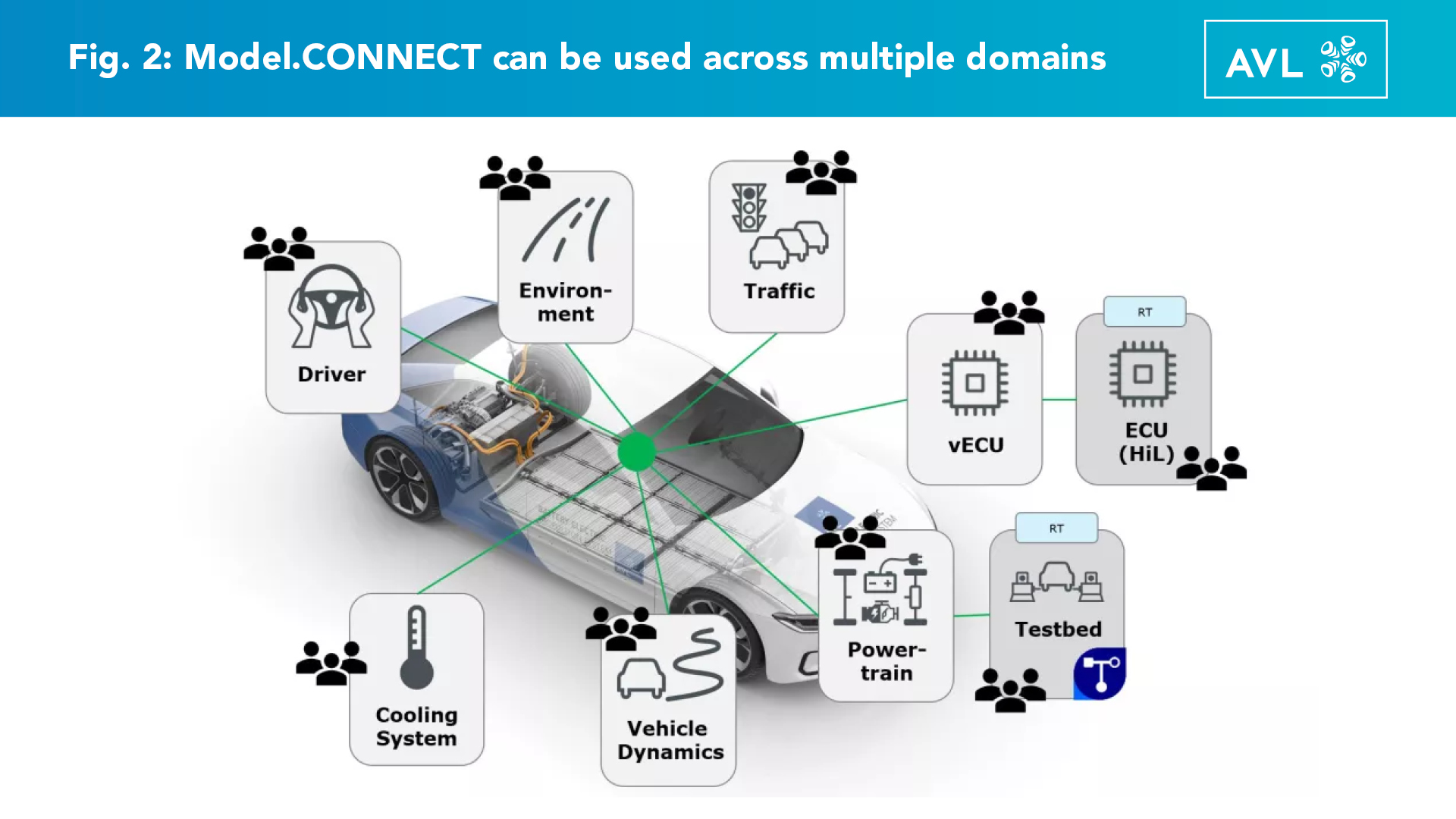
Model.CONNECT represents AVL's cutting-edge open model integration and co-simulation platform. It plays a central role in promoting informed decision-making by seamlessly connecting models and expertise from diverse departments, tools, and vendors in a secure and reproducible manner (see Fig. 2).
At the Heart of the DRIVINGCUBE
To effectively combine various sensor stimulation equipment, the ADAS controller, and the virtual environment, AVL leverages Model.CONNECT and Testbed.CONNECT™. At the core of the DRIVINGCUBE, Model.CONNECT serves as the fundamental tool that integrates the DRIVINGCUBE into the virtual environment.
This integration can include components like Hexagon VTD for environment simulation (rendering and traffic) and AVL VSM™ for modeling vehicle dynamics. Importantly, Model.CONNECT is modular and can substitute components with other software e.g., for vehicle dynamics. Testbed.CONNECT links Model.CONNECT as the simulation integration platform to the testbed controller, such as the RENK chassis dynamometer automation system used at CU-ICAR.
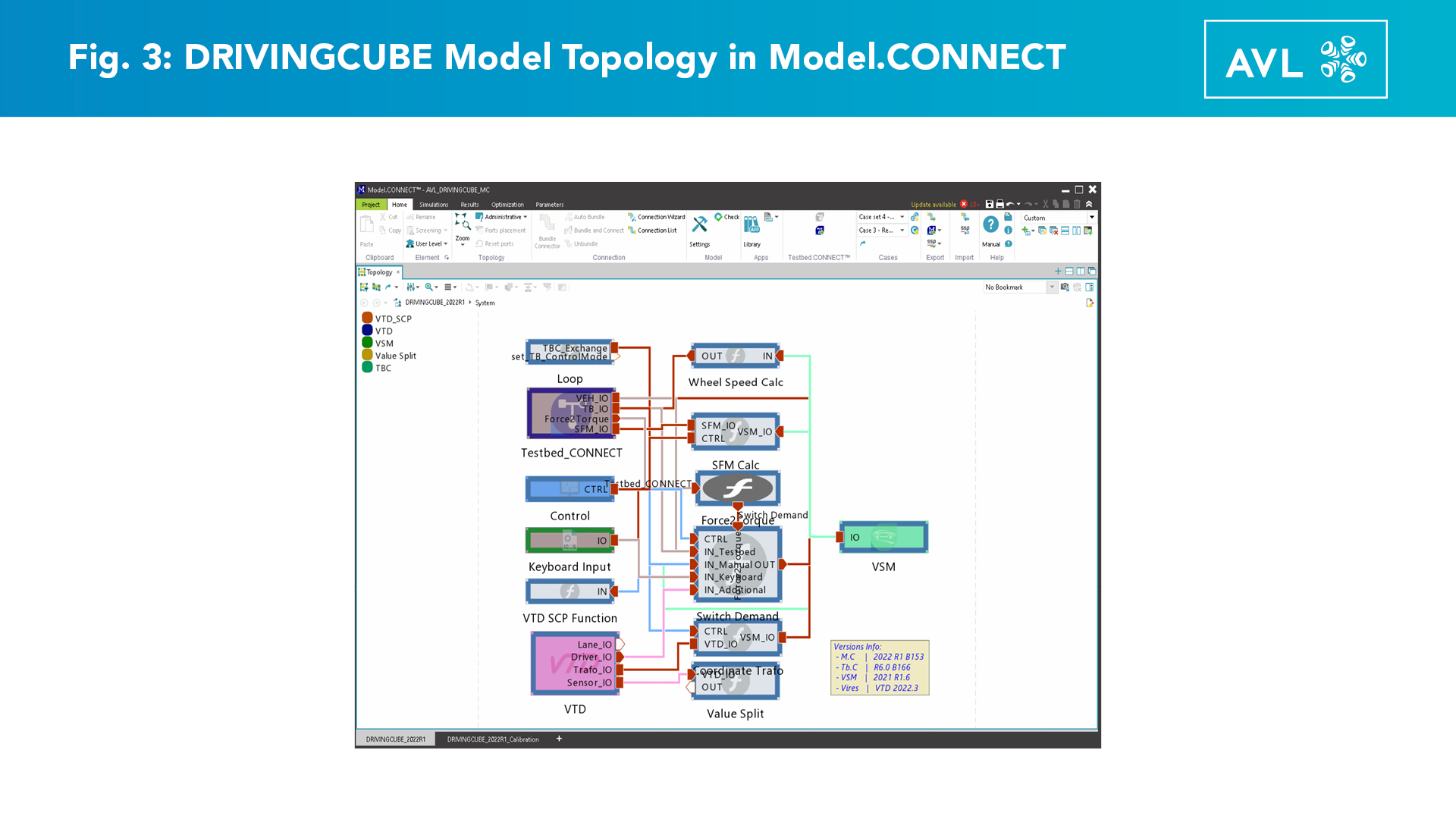
The typical workflow in Model.CONNECT begins with the user setting up the model including all relevant sensors, components, connecting the signals in between the components, and configuring the model including components or sub-models. The topology shown in Fig. 3 provides an overview of the DRIVINGCUBE model, which consists of the following key components:
- Testbed Interface
- AVL VSM (AVL’s vehicle dynamics simulation tool)
- VTD (environment simulation
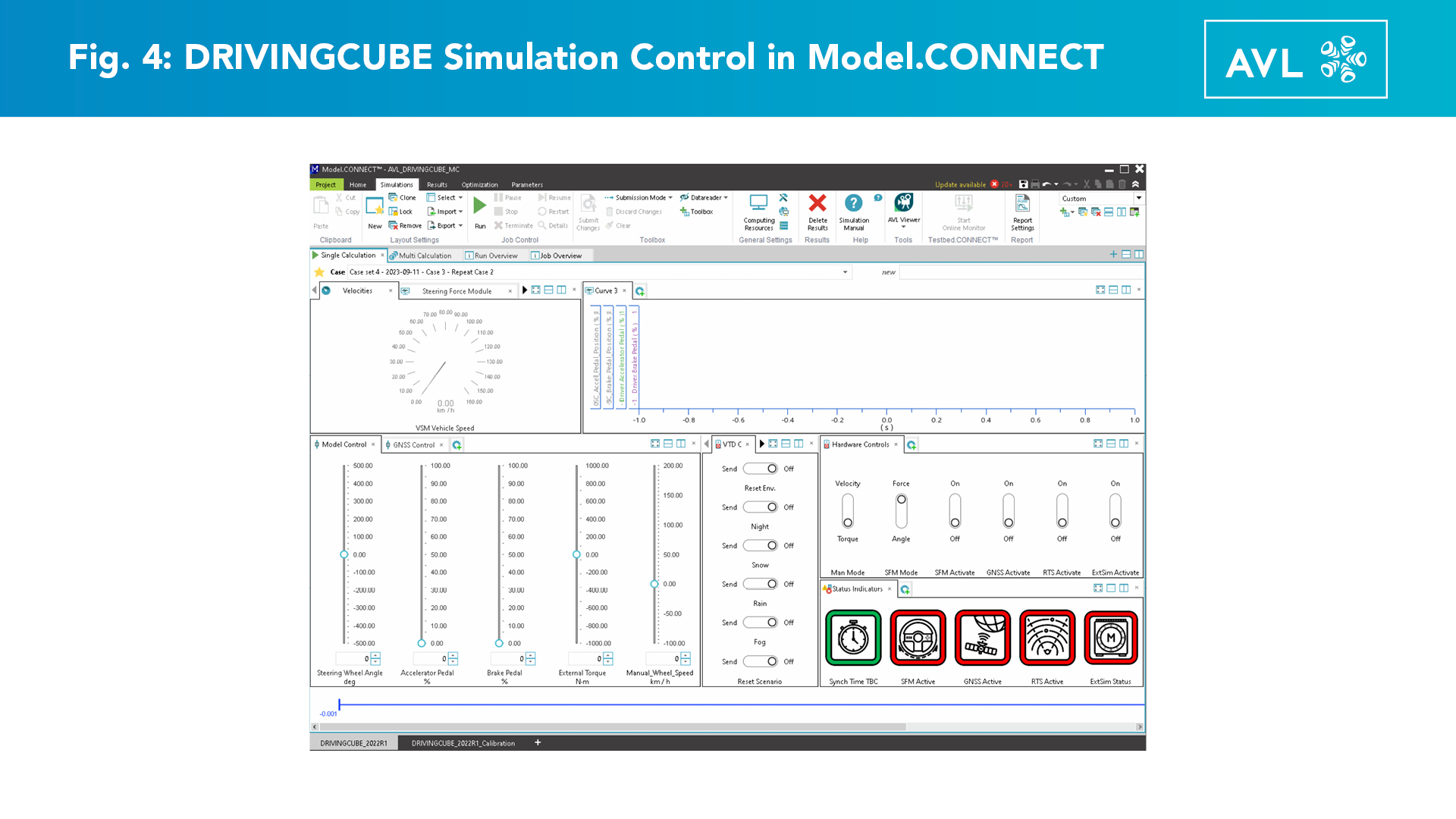
Once the model has been properly configured and in connection with a VTD workstation under the Home tab, the next step in the workflow is to run the co-simulation model, for which a designated Simulations tab with options exists.
The simulation control GUI customized for DRIVINGCUBE contains various panels with miscellaneous switches, sliders, dial indicators, and graphs (Fig. 4). In the bottom right of Fig. 4 are switches with control light indicators to turn on/ off various stimulation equipment e.g., steering force emulation and radar stimulation.
The sliders on the bottom left can be used in case there is not a driver in the vehicle to provide manual input values for acceleration, brake pedal, speed or torque and steering angle, which is convenient for a new setup or stimulator calibration. The top half of the screen shows key quantities for monitoring purpose for the operator.
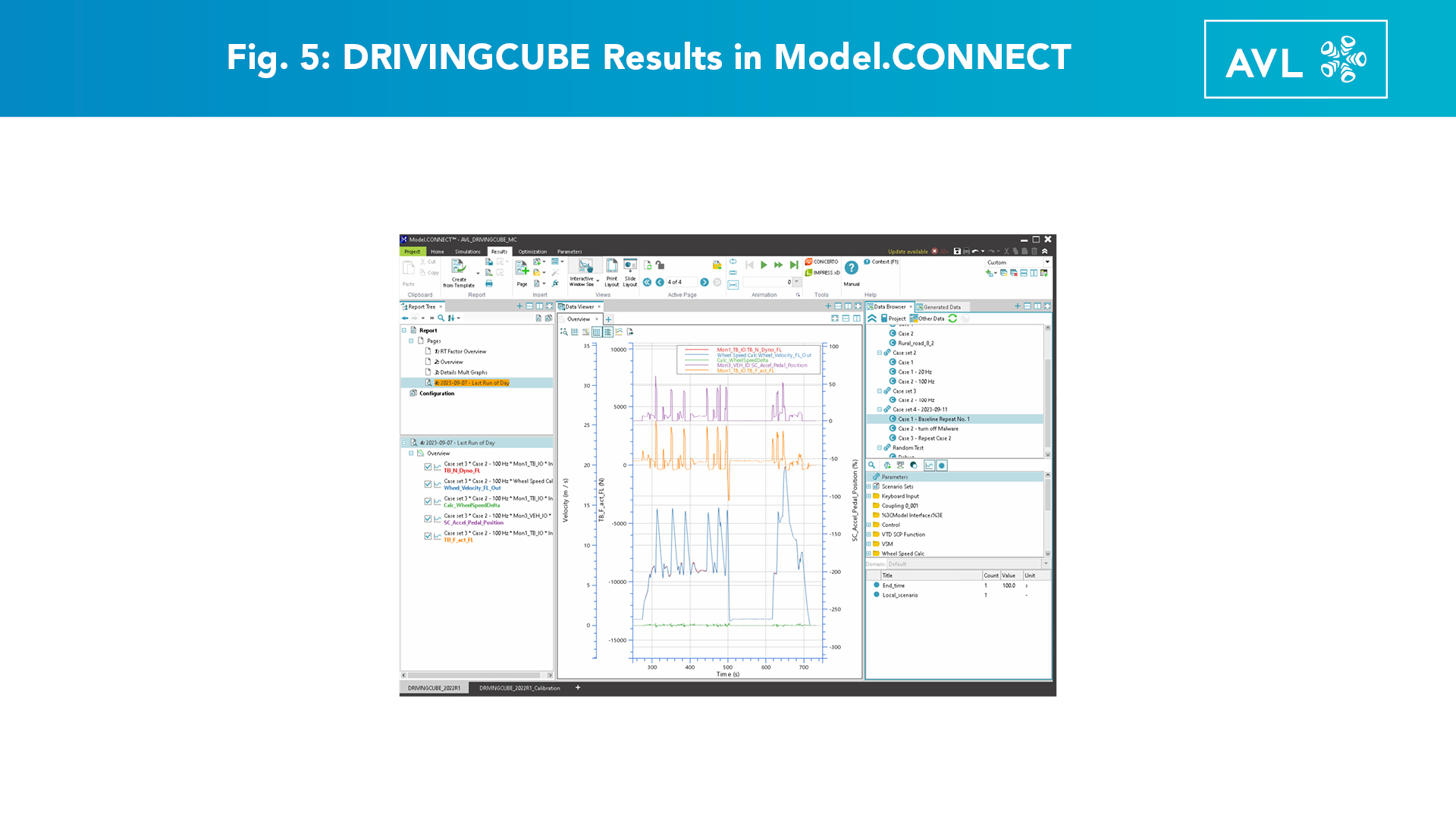
When a test run has been completed, the results can be directly inspected via the Results tab as illustrated in Fig. 5. The user can select signals of interest via the data browser, which is on the right side in Fig. 5, and then visualize the data with the data viewer, which is shown in the center panel.
To support the user with a multitude of views and reporting schemes needed for many different tests and data sets, there are various options for display and configuration available via the report tree on the left side in Fig. 5.
Impacting Development Efficiency
Model.CONNECT substantially enhances development efficiency because it allows users to seamlessly link various simulation models created with different tools into a coherent virtual prototype. Coupling of multiple physical and virtual systems is a complex topic, hence a software capable of supporting the engineer by reducing integration effort, ease of use, and minimizing human error can lead to major improvements in development efficiency.
Some key benefits that Model.CONNECT provides the engineer with are:
- Efficient integration of existing models from tools like Simulink, AMESim, VTD, GT, IPG, MSC ADAMS, and AVL (more than 30 predefined interfaces to industry simulation tools)
- Compliance with industry standards incl. Functional Mock-up Interface (FMI) and XCP
- Compatibility with user-generated code in Python, C/C++, Java, and more
- Producing accurate results quickly through a unique coupling algorithm
- Connecting co-simulation with real-time systems using patented RT-synchronization technology
- Highly customizable and automatable via Python Scripting Interfaces and API
Seamless Integration is Key
In summary, the integration of virtual environments and physical units under test, powered by Model.CONNECT, is instrumental in advancing ADAS/AD technology such as the AVL DRIVINGCUBE.
Industry Day Event at Clemson University CU-ICAR
In Fall 2023, AVL held an Industry Day event “Exploring the Digital Proving Ground” at CU-ICAR where attendees joined the research teams in laboratory tours, live demonstrations, and interactive panel discussions.
They learned more about the DRIVINGCUBE and during live demonstrations could witness how this pivotal technology can be used for successful development of ADAS/ AD solutions. Looking at it from the control room perspective and onboard the test vehicle they could see firsthand how the system can be used for Automated Lane Keeping System (ALKS) and Adaptive Cruise Control (ACC) function validation, as specific scenarios were demonstrated.
What’s next at Clemson University’s DRIVINGCUBE?
Looking forward, there are exciting prospects for additional future use cases for Model.CONNECT and the DRIVINGCUBE at CU-ICAR:
- Exploring off-road applications to expand its utility (see. Fig. 6)
- Utilizing the benefits of Modelica FMI3 standard
- Embracing cloud and high-performance computing (HPC) capabilities for scalability
- Integrating Model.CONNECT with SDT Database (ModelServer) for versioning and model comparison
- Implementing AVL SCENIUS toolchain for end-to-end consistency and traceability in ADAS/AD safety function development
- Exploring the potential of strategic partnerships, such as AVL’s collaboration with Microsoft, to enhance the platform's capabilities
Ready to explore this technology for yourself?
We look forward to meeting you and discussing implementation strategies or use cases!
To schedule a Model.CONNECT demo, please contact us at simulation-support.na@avl.com.
To meet with our DRIVINGCUBE experts please contact us at namarketing@avl.com.