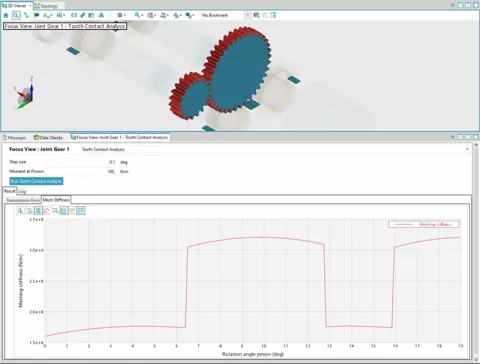
표준 기어박스-NVH와 같은 애플리케이션 시나리오의 경우, 최적화/DoE 작업 및 기타 EXITION M이 더 빠른 솔루션인 새로운 주파수 영역 솔루션(FDS)을 제공합니다. 잘 알려진 시간 영역 솔루션(TDS)의 대안으로 또는 보완책으로 FDS를 사용할 수 있습니다. e-액슬의 주기적 여기와 관련된 소스는 기어 여기력입니다. 이러한 기어 여기력은 분석적 톱니 접촉 분석(TCA)을 사용하여 계산됩니다.
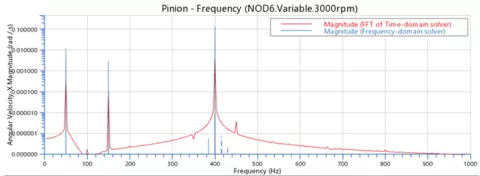
이 솔루션은 분석된 주파수에 대한 모든 노드 바디 모션 수량(즉, 변위/속도/가속도)에 대한 결과를 제공합니다.
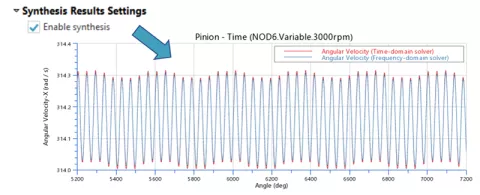
다른 좌표계로 결과를 표시하기 위해 각도/시간 영역에서 결과의 합성이 지원됩니다.
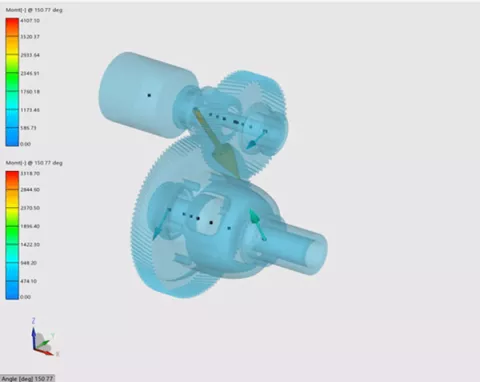
이제 차트 기반 표현 외에도 두 가지 방식으로 3D FDS 결과에 애니메이션을 적용할 수 있는 옵션이 제공됩니다.
- 단일 주파수에서의 신체 움직임별(노드 수량 데이터 복구 포함)
- 단일 주파수의 조합을 시간 및 각도 등가 신호로 표현하는 바디 결과를 합성합니다.
시스템 동작에 영향을 미치고 제어할 수 있는 간단한 제어 시스템 기능을 모델링하기 위한 여러 새로운 요소가 제공됩니다. 예를 들어, 실린더 압력 적용(예: 스로틀 위치 변경을 통해)이나 구동 시스템 내에서의 전환 동작(예: 클러치 작동)을 수행할 수 있습니다.
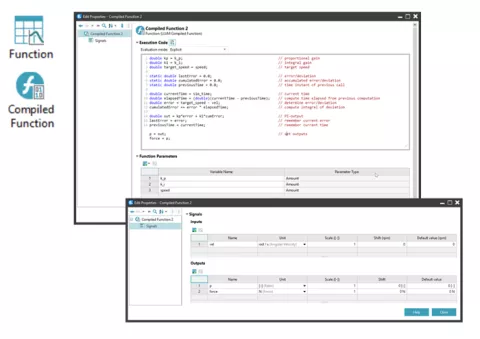
또한 C-코드를 소위 컴파일된 기능 형태로 통합할 수 있기 때문에 기본 제어 기능(예: PI 컨트롤러)을 통합할 수 있습니다. 더 이상 외부 도구와의 Co-시뮬레이션이 필요하지 않습니다.
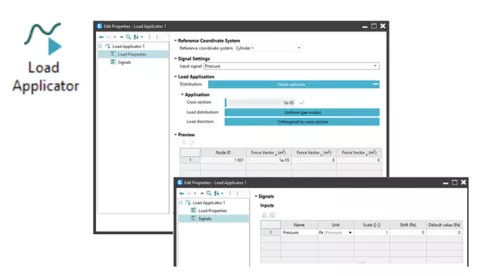
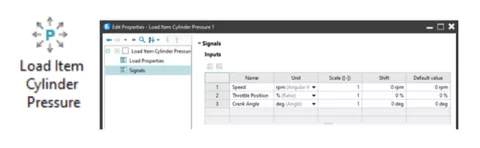
또 다른 혁신은 신호와 제어입니다. 이제 EXCITE M의 그래픽 프론트엔드에서 첫 번째 구성 요소 세트를 제공합니다. 로드 어플리케이터 및 로드 아이템 실린더 압력: 본체 노드에서 지정된 입력 신호에 따라 압력, 힘 및 모멘트와 같은 로드를 적용합니다.
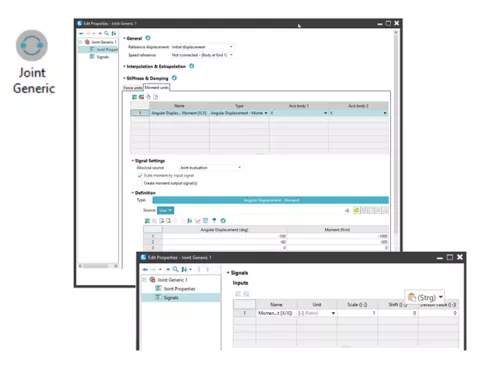
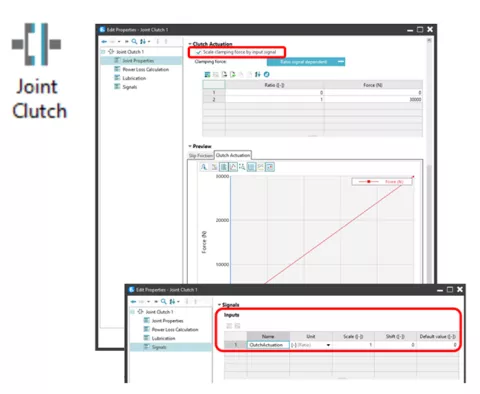
마찰 클러치, 간단한 동기 장치 유닛 또는 도그 클러치와 같은 스위칭 요소를 모델링하고 작동시키기 위해 기존 조인트 기능이 확장되었습니다. 이 확장에는 조인트 특성 클램핑 힘, 강성/댐핑이 포함됩니다. 이제 입력 신호를 통해 설정하고 확장할 수 있습니다.
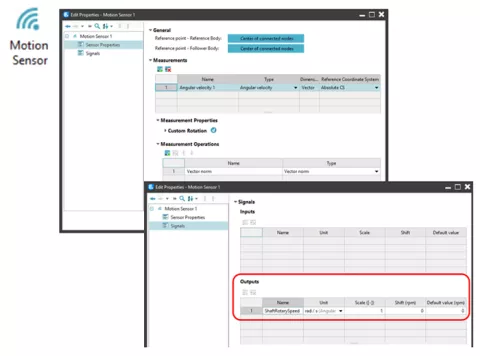
하우징 또는 엔진 블록에 대한 특정 노드 위치에서 샤프트/크랭크샤프트의 회전 속도를 측정하는 것은 복잡합니다. 이 새로운 구성 요소를 사용하면 두 물체의 노드 사이에서 상대적인 병진 및 회전 동작을 감지하고 처리할 수 있습니다. 또한 3D 벡터 판독값을 벡터 표준 또는 스칼라 투영과 같은 단일 신호로 변환하는 기본 기능을 제공합니다.
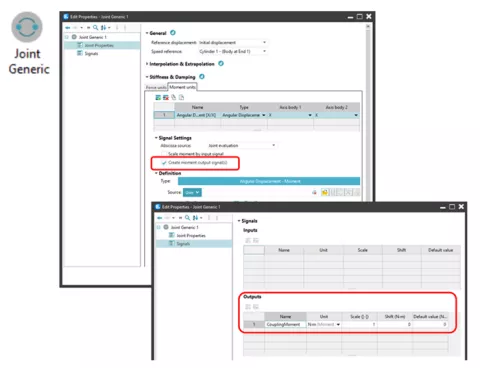
포스/모멘트 조인트(FTAB)의 기존 테이블은 기본적인 힘/모멘트 측정 작업을 수행하도록 확장되었습니다. 다양한 FTAB 옵션 각각에 대해 조인트에서 제공하는 출력 신호를 통해 결과적인 힘/모멘트에 액세스할 수 있습니다.
사용자는 EXCITE 모델의 모든 입력 및 출력 신호를 가져와 해당 모델에서 특정 기능을 수행하는 코드에 사용할 수 있습니다. C-코드와 EXITE 솔버 링크의 컴파일은 자동으로 이루어지며 사용자의 작업이 필요하지 않습니다. 이를 통해 사용자는 특정 요구 사항을 충족하기 위해 EXCITE의 기능을 크게 확장할 수 있습니다.
이제 EXCITE M과 Model.CONNECT를 연결할 수 있습니다. 이는 새로운 구성 요소를 통해 실현할 수 있습니다. EXCITE M 모델에는 임의의 수의 Model.CONNECT 인터페이스 구성 요소를 임의로 추가할 수 있습니다. Model.CONNECT 구성 요소는 EXCITE M의 신호 네트워크의 일부입니다. 즉, 교환할 모든 EXCITE M 수량에 대한 입력 및 출력 신호를 정의할 수 있습니다.

지금까지 EXCITE은 모든 기계 유형에 대해 최대 20 kHz의 고주파수까지 음향 분석을 위한 조인트 유형을 제공했습니다. 이제 트랙션 모터 및 하이브리드 애플리케이션의 저주파 문제를 분석할 수 있도록 조인트 유형과 전류 컨트롤러가 추가로 도입되었습니다.
EXCITE M은 전기 모터 조인트에 대해 다음과 같은 접근 방식을 제공합니다.
- 맵 기반(사전 계산된 포스와 모멘트 가져오기) - 반경 방향 플럭스가 있는 모든 전기 모터 유형에 사용 가능
- 매개변수 기반(선형 기본 파동 모델) - PMSM(영구 자석 동기 모터), EESM(외부 여기 동기 모터), SCM(스퀴럴 케이지 유도 모터) 및 SYRM(동기 저항 모터)에 사용 가능
- 파일 기반 - PMSM에 사용 가능
o 포화 기본 파동 모델 - 전류 의존 인덕턴스 및 영구 자석 플럭스 연결을 위한 파일
o MFC(자기장 계산) - 위상 투 위상 플럭스 연결 및 토크/고정자 톱니 힘/톱니 축 모멘트를 위한 파일
- ‘Axial-Axia’: 고정자 축(Axial) 노드에 연결된 고정자 축 노드(로터 편심 고려 포함 또는 고려 미포함)
- ‘Axial-원주 방향’: 고정자 티스 노드에 연결된 고정자 톱니 노드(로터 편심 고려 포함 또는 고려 미포함)
모터 또는 회생 모드에서 트랙션 애플리케이션을 위한 최첨단 전류 제어를 반영하는 새로운 제어 시스템이 EESM 및 SICM에 도입되었습니다.