
차량 개발 과정에서는 다양한 법적 요구 사항과 내부 기준을 충족해야 합니다. 제조업체와 고객 모두 차량 모델의 성격과 브랜드 정체성을 결정짓는 핸들링 특성에 대해 구체적인 기대를 가지고 있습니다
문제는 인간의 인식이 항상 주관적이라는 점입니다. 시험자는 기분이나 건강 상태와 같은 외부 요인에 의해 영향을 받을 수 있으며, 이는 평가 결과에 변동을 초래할 수 있습니다. 특히 가상 환경에서의 테스트에서는 기존 방법을 사용하여 신뢰할 만한 평가를 내리기가 어렵습니다.
AVL-DRIVE™는 다양한 실험군과의 연구를 통해 물리적 매개변수를 기반으로 인간의 감각을 설명하는 알고리즘을 개발했습니다. 이를 통해 목표 설정에서 품질 관리, 최종 승인에 이르기까지 모든 개발 환경에서 실시간으로 객관적이고 사용자 중심의 차량 평가 및 검증이 가능해졌습니다. AVL-DRIVE™는 주관적인 감각을 측정하고 평가할 수 있도록 합니다.

측정 시스템은 종·횡가속도, 엔진 속도, 차량 속도, 페달 설정, 진동 등 다양한 센서 및 CAN 버스 신호를 기록합니다. DMU(drive main unit)는 이러한 데이터를 AVL-DRIVE™ 소프트웨어로 전달해 추가 처리를 수행합니다.
주행성, 승차감, 핸들링 및 ADAS 등 200가지 이상의 주행 모드를 자동으로 인식하며, 450개 이상의 평가 기준을 실시간으로 분석하여 객관적인 결과를 제공합니다. 이 과정에서 여러 동작이 겹치는 경우에도 동시에 탐지하고 평가할 수 있습니다.
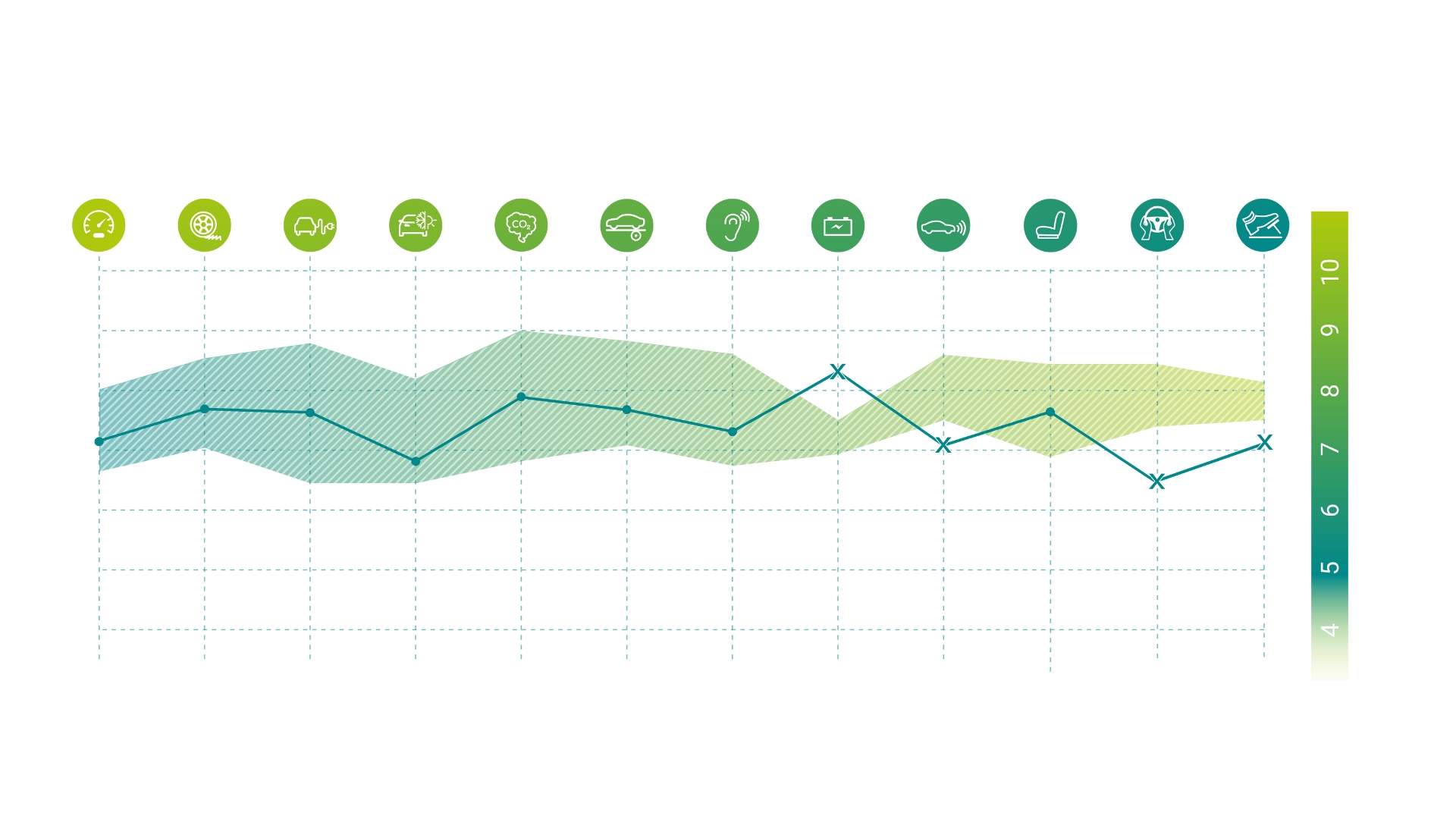
테스트 결과는 그래픽으로 시각화되어 데이터 분석 속도를 높입니다. 보고서 및 벤치마크 라이브러리는 자동 생성되어 태스트 결과를 빠르게 공유할 수 있습니다.
벤치마크 분석을 기반으로 차량 속성에 대한 품질 목표를 설정하며, 개발 전 과정에서 이를 참조하여 차량 속성을 평가합니다.
핸들링 특성을 초기 단계에서 선제적으로 개발하면 필요한 차량 시험평가 횟수를 줄이고 비용을 절감할 수 있습니다. 초기 단계에서 병렬 개발 옵션을 사용하면 품질 또한 향상됩니다.
AVL-DRIVE™, AVL VSM™, AVL PUMA Open™, AVL CAMEO™를 통합한 폐쇄형 최적화 프로세스는 차량 개발 및 시뮬레이션은 물론 엔진 및 동력 시스템 테스트베드에서도 새로운 효율성을 제공합니다.
AVL-DRIVE™ 사용은 많은 이점을 제공합니다.
관련된 수고 및 비용 절감
- 개발 반복 횟수 감소
- 프론트로딩을 통한 시간 및 비용 절감
- 최종 사용자의 편안함과 안전에 대한 기대치를 더 빠르고 정확하게 실현
향상된 커뮤니케이션
- 전문가 팀 간의 조율 최적화
- 엔지니어링과 관리 부서, OEM과 공급 업체 간의 명확한 커뮤니케이션 지원
- 차량 개발의 유연성 향상
일관된 데이터 비교 가능성
- 설계 단계부터 최종 승인 및 품질 보증 관리까지 모든 플랫폼/드라이브 개념에 대한 평가 가능
- 시장 및 브랜드별 고유한 차량 특성과 DNA의 구축
AVL-DRIVE™는 주행 성능, 편안함, 핸들링, 그리고 ADAS/AD 기능의 개발을 새로운 수준으로 끌어올립니다. 이는 개발 과정 전반은 물론 그 이후 단계까지 적용됩니다.
실시간 평가
실제 도로 환경에서 주행하는 동안, 켈리브레이션 전문가는 테스트 실행 상태, 발견된 오류, 그리고 어떤 수정이 필요한지에 대한 자세한 정보가 실시간으로 제공됩니다. 이를 통해 개발 반복을 줄이고 시간과 비용을 절감할 수 있습니다.
에너지 관리 및 파워트레인 전략
AVL-DRIVE™ VIORE 애드온은 주행성 기준과 에너지 관리 KPI를 기반으로 파워트레인 전략을 객관적으로 평가할 수 있게 합니다. 이를 통해 운영 전략을 객관적으로 측정하고 비교할 수 있으며, 파워트레인의 효율성과 주행의 즐거움을 동시에 충족할 수 있습니다.
개방형 아키텍처
AVL-DRIVE™는 유연성을 높이기 위한 인터페이스를 제공합니다. 이를 통해 소프트웨어를 사용자의 디지털 인프라에 완벽하게 통합할 수 있습니다. 또한, 개방형 시스템 아키텍처는 사용자의 요구에 유연하게 대응할 수 있으며, 다양한 매개변수의 레이아웃을 사용자의 선호에 맞게 조정할 수 있습니다.
반자동 및 고도 자동화 주행을 위한 준비
AVL-DRIVE™ AD는 운전자가 직접 작동하는 주행 성능 평가(AVL-DRIVE™ DRIVEABILITY) 외에도, 반자동 및 고도자동화 주행 기술 개발에 기여합니다. 기동 탐지 및 평가는 객관적인 평가를 이끌어 내며, Adaptive Cruise Control(ACC)과 Lane Keep Assist(LKA)와 같은 ADAS 기능은 꾸준한 신뢰를 얻고 있습니다.