Szenariobasiertes Testen und Sicherheitsargumentation mit AVL SCENIUS™
Veröffentlicht: August 05, 2025 · 8 Min. Lesezeit
Die Branche befindet sich in einem tiefgreifenden Wandel. Anstatt den Erfolg an der Anzahl der gefahrenen Kilometer zu messen, liegt der Fokus nun darauf, das System kritischen Verkehrssituationen auszusetzen, also jenen Momenten, in denen eine ADAS- oder AD-Funktion aktiv beweisen muss, dass sie sicher reagieren kann.
Hier kommt das szenariobasierte Testen für automatisiertes Fahren ins Spiel. Durch die Verwendung wohldefinierter, reproduzierbarer Szenarien lassen sich Funktionen gezielt, transparent und skalierbar testen. Es unterstützt die agile Entwicklung mit Techniken wie dem kontinuierlichen Testen. Jedes Mal, wenn eine neue Softwareversion veröffentlicht wird, wird sie mit denselben Szenarien getestet. So lassen sich Testergebnisse leicht vergleichen und Rückschritte oder Verbesserungen im Verhalten feststellen.
Das szenariobasierte Testen spielt auch bei der Validierung eine wichtige Rolle. Dies ist die Phase, in der die SOTIF-Validierung für ADAS-Funktionen entscheidend wird. Ziel ist es, kritische Fälle zu identifizieren, also unbekannte oder unerwartete Situationen, denen das System noch nicht begegnet ist, und zu überprüfen, ob das Fahrzeug sie sicher bewältigen kann.
Kurz gesagt, szenariobasiertes Testen ist:
- Effizienter: Sie führen aussagekräftigere Tests durch, indem Sie sich auf relevante, sicherheitskritische Momente konzentrieren.
- Reproduzierbar: Die Testfälle funktionieren in der Simulation und können in der realen Welt wiederholt werden.
- Parametrisierbar: Sie können Bedingungen wie Startposition, Geschwindigkeit und Entfernung variieren, um Szenarien einfacher oder schwieriger zu gestalten.
Verschiedene Teams haben oft unterschiedliche Definitionen. Bei AVL folgen wir einer Definition, die von europäischen Forschungsprojekten wie PEGASUS und ENABLE-S3 unterstützt wird.
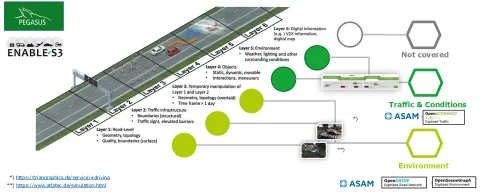
Szenarien werden auf mehreren Ebenen beschrieben:
Statische Ebene: Straßenpläne, Schilder, Infrastruktur, Bauzonen
Dynamische Ebene: Beteiligte Akteure, Fahrzeugverhalten, Fahrmanöver
Umgebungsschicht: Wetter, Tageszeit, Straßenzustand
Digitale Infrastruktur: V2X-Kommunikation und Systemnachrichten
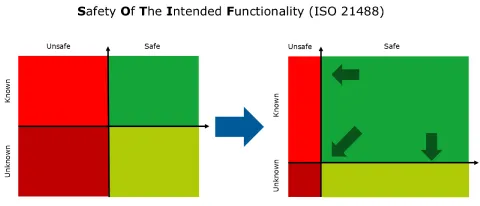
Um die Sicherheit von ADAS/AD-Funktionen systematisch zu validieren, stützen sich viele Teams auf die SOTIF-Methodik (ISO 21448). Der Grundgedanke besteht darin, Verkehrssituationen, die auf den Straßen vorkommen können, in sichere/unsichere und bekannte/unbekannte Situationen zu kategorisieren. Dabei sollten sichere und bekannte Situationen erhöht, unbekannte und unsichere Situationen dagegen verringert werden. Sie sind gefährlich, weil nicht klar ist, wie das ADAS/AD-System auf sie reagieren wird.
Die Herausforderung besteht darin, die große Bandbreite möglicher Verkehrssituationen abzudecken. Um dieses Ziel zu erreichen, werden in der Regel verschiedene Methoden angewandt.
Eine davon ist ein Mehrsäulenansatz für die SOTIF-Validierung in verschiedenen Testumgebungen. Zu diesen Umgebungen gehören:
- Die Simulation
- Hardware-im-Loop (HiL)
- Fahrer-Simulatoren
- Fahrzeug-im-Loop (ViL)
- Erprobungsgelände
- Öffentliche Straßen
Der Schlüssel zum Erfolg liegt darin, die richtige Mischung zwischen diesen Testumgebungen zu finden. Jede dieser Umgebungen erfüllt einen bestimmten Zweck. Der Schlüssel liegt darin, sie in einem zusammenhängenden, nachvollziehbaren Arbeitsablauf zu orchestrieren. Genau dafür wurde AVL SCENIUS™ entwickelt.
SCENIUS ist eine umfassende Toolchain zur Rationalisierung szenariobasierter ADAS/AD-Validierungen.
Sie bietet ein zentrales Szenario-Management durch den Scenario Data Manager, der es Benutzern ermöglicht, Szenarien in einer einheitlichen Datenbank zu importieren, zu aktualisieren und zu verwalten, um eine nahtlose Zusammenarbeit zu ermöglichen. Durch die Unterstützung der ASAM OpenSCENARIO®-Standards gewährleistet SCENIUS die Kompatibilität mit Industrienormen und ermöglicht es den Benutzern, Verkehrsszenarien effizient zu entwerfen, zu bearbeiten und zu verifizieren.
Dank skalierbarer Architektur können Szenarien in Cluster- oder Cloud-Umgebungen mit dem AVL Scenario Simulator™ ausgeführt werden, was virtuelle Tests im großen Maßstab erleichtert. Der intuitive AVL Scenario Designer™ vereinfacht die Erstellung und Überprüfung von Szenarien und bietet Werkzeuge zum Importieren von Straßennetzen, Akteuren und dynamischen Verhaltensweisen sowie zum Exportieren von Szenarien im OpenSCENARIO-Format.
Darüber hinaus steigert SCENIUS die Produktivität mit umfassender Datenverarbeitung, flexiblen Optionen für den Szenarioexport und Echtzeitüberwachungs- und -analysefunktionen, so dass die Benutzer ADAS/AD-Systeme zuverlässig und präzise validieren können.
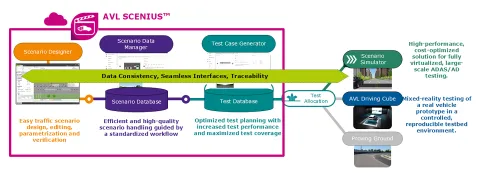
Die Toolchain besteht aus:
Scenario Designer: Erstellung und Bearbeitung von ADAS-Szenario-Simulationstools auf der Grundlage von ASAM OpenSCENARIO und OpenDRIVE mit einer intuitiven Benutzeroberfläche. Der Scenario Designer bietet intuitive Werkzeuge für die Erstellung und Überprüfung von Szenarien, einschließlich des Imports von Straßennetzen, des Hinzufügens dynamischer Verhaltensweisen und des Exports von Szenarien im OpenSCENARIO-Format. Dadurch wird sichergestellt, dass die Szenarien robust und bereit für die Simulation sind.
Szenario-Daten-Manager: Organisieren und verwalten Sie alle Testszenarien in einer zentralen Datenbank. Gewährleistet Konsistenz, Zusammenarbeit und Rückverfolgbarkeit zwischen den Teams, zertifiziert nach ISO 26262.
Testfall-Generator: Definieren Sie intelligente Teststrategien und reduzieren Sie den Testaufwand durch die Automatisierung von Parametervariationen. Es sind Schnittstellen zur Verknüpfung mit Simulation, ViL und Testgelände verfügbar.
- Scenario Simulator: Eine leistungsstarke, kosteneffiziente Simulationsplattform für groß angelegte virtuelle Tests von ADAS/AD-Funktionen.
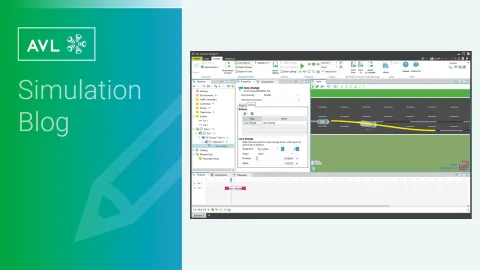
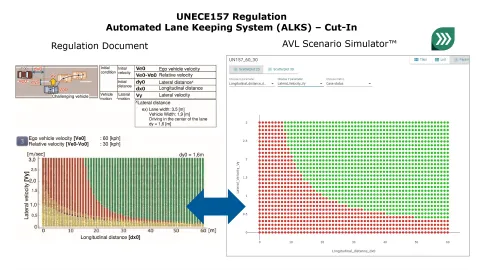
Um die Konformität eines ALKS-Modells mit den Industriestandards mit SCENIUS zu überprüfen, beginnt der Testprozess im Szenario Designer. In diesem Schritt werden Verkehrsszenarien gemäß dem ASAM OpenSCENARIO®-Standard erstellt und parametrisiert, wobei Elemente wie Fahrzeugdynamik, Fahrspurkonfigurationen und Umweltbedingungen berücksichtigt werden.
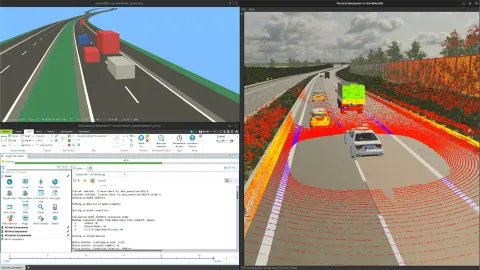
Das ALKS-Modell, das in der Regel einen adaptiven Geschwindigkeitsregler, einen Spurhalteassistenten, Radarsensoren auf der Grundlage der offenen Simulationsschnittstelle und ein Wahrnehmungsmodul umfasst, wird dann in den Szenario Simulator integriert. Diese Integration ermöglicht Closed-Loop-Simulationen zur gründlichen Bewertung der Systemleistung unter verschiedenen Fahrbedingungen.
Während der Simulation werden wichtige Leistungsindikatoren wie die Spurhaltegenauigkeit, die Gierrate des Fahrzeugs und der Abstand zur Fahrspurmitte kontinuierlich überwacht und mit SCENIUS analysiert. Nach Abschluss der Tests werden detaillierte Berichte erstellt, die die Testergebnisse zusammenfassen und die Einhaltung der ALKS-Standards eindeutig belegen.
Sehen Sie sich die praktische Workflow-Demonstration von SCENIUS an, um diesen Workflow im Detail kennenzulernen.
Stay tuned
Don't miss the Simulation blog series. Sign up today and stay informed!

Szenariobasierte Tests sind ein entscheidender Aspekt des Entwicklungsprozesses für fortschrittliche Fahrerassistenzsysteme und autonome Fahrfunktionen. Wir thematisieren den Arbeitsablauf für die Erstellung und Parametrisierung einer Reihe von Szenarien für ein Automated Lane Keeping System mit dem Scenario Designer.
Simulation ist heute unverzichtbar für die Sicherheit autonomer Fahrzeuge – doch wie verlässlich sind die Ergebnisse?
Der neue AVL Scenario Simulator™ ist eine kostenoptimierte Lösung für vollautomatische, groß angelegte ADAS/AD-Tests. Erstellen Sie für jeden Testzweck den optimalen virtuellen Prototyp.
Stay tuned for the Simulation Blog
Don't miss the Simulation blog series. Sign up today and stay informed!