Simulation-Driven Design für mobile Wasserstoffbetankung: Effizienzsteigerung durch Systemverständnis
Veröffentlicht: September 30, 2025 · 12 Min. Lesezeit

Der Einsatz von Wasserstoffantrieben auf abgelegenen Baustellen, in der Landwirtschaft oder im Steinbruch bringt besondere Herausforderungen mit sich. Die Maschinen laufen dort oft viele Stunden am Stück, weisen einen hohen Energiebedarf auf und können in der Regel nicht auf stationäre Tankinfrastruktur zurückgreifen. Deren Aufbau ist – abhängig von Betriebsgröße und Fahrzeuganzahl – häufig nicht wirtschaftlich. Die Wasserstoffversorgung wird dadurch komplex: Eine zuverlässige und effiziente Betankung direkt vor Ort ist unverzichtbar, um den Betrieb sicherzustellen. Mobile Lösungen müssen daher nicht nur sicher und leistungsstark, sondern auch flexibel genug sein, um unterschiedlichen Einsatzbedingungen gerecht zu werden.
Eine Lösung: mobile Wasserstofftankstellen, die eine 700-bar-Betankung direkt vor Ort ermöglichen. Doch wie effizient ist eine solche Lösung? Welche physikalischen Prozesse dominieren den Betankungsvorgang? Und wie lassen sich Komponenten gezielt optimieren, um von thermischen und mechanischen Bauteilgrenzen fernzubleiben und die Betankungsdauer zu verkürzen?
Antworten auf diese Fragen liefert ein umfassender Simulationsansatz, der das gesamte Systemverhalten – von der Tankstelle bis zum Fahrzeugtank – abbildet.
Der Aufbau der untersuchten mobilen Wasserstofftankstelle ist in Abbildung 1 schematisch dargestellt. Die Tankstelle verfügt über mehrere 700-bar-Wasserstoffspeicher, die an einer stationären Tankstelle befüllt werden. Im Unterschied zu reinen Überström-Tanksystemen ist ein zusätzlicher Tank verbaut, der ein spezielles Fluid enthält, welches keine Verbindung mit dem Wasserstoff eingeht. Dieses Fluid wird während der Betankung jeweils in einen Wasserstofftank gepumpt – dadurch ist eine nahezu vollständige Entleerung der Tankstellentanks möglich. Die benötigte Antriebsleistung der Pumpe kann entweder vom zu betankenden Fahrzeug oder vom Trägerfahrzeug der Tankstelle bereitgestellt werden.

Die Verbindung zum Fahrzeug wird dabei über einen flexiblen Betankungsschlauch und ein Receptacle durchgeführt. Am Fahrzeug wird der Wasserstoff über einen Verteilblock zu den einzelnen Tanks geleitet, die jeweils ein On-Tank-Valve aufweisen.
Sowohl die Wasserstoffstrecke von der Tankstelle bis zu den Fahrzeugtanks als auch das Pumpfluid erzeugen komplexe Druck-, Temperatur- und Massenstromverläufe, die in der Simulation präzise abgebildet werden sollen. Der Verlauf der Zustandsgrößen im Fahrzeugtank für einen Betankungsvorgang ist in Abbildung 2 dargestellt.
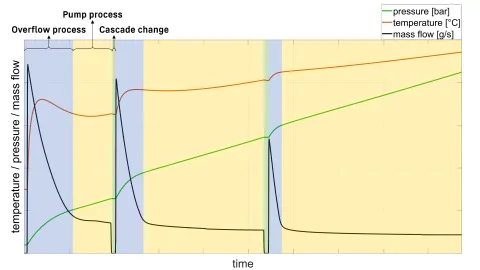
Die Betankung erfolgt dabei kaskadiert (Tank für Tank) und jeweils in mehreren Phasen:
- Überströmen (blau): Wasserstoff strömt aus einem vollen Tankstellentank in den Fahrzeugtank – getrieben durch den Druckunterschied. Hier tritt der höchste Massenstrom auf, verursacht durch den anfangs großen Druckunterschied.
- Pumpvorgang (gelb): Der Druckunterschied zwischen Tankstelle und Fahrzeug reicht nicht mehr aus, um den Massenstrom aufrecht zu halten. Deshalb wird ein Fluid in den teils geleerten Tankstellentank gepumpt, um den restlichen Wasserstoff auszuschieben.
- Kaskadenwechsel (grün): Nach Entleerung eines Tanks wird zum nächsten übergegangen und es wird wieder mit der Überström-Phase begonnen. Dabei wird das Fluid über die Pumpe aus dem zuvor entleerten Tank in den nächsten zu entleerenden Tank weitergeleitet.
Dabei treten je nach Anfangs- und Betriebsbedingungen sehr weite Wertebereiche der maßgebenden Zustandsgrößen auf, welche aufgrund von Bauteilgrenzen teilweise begrenzt und somit durch die Simulation identifiziert und abgedeckt werden müssen.
- Druckbereiche: 30 bis 875 bar
- Temperaturverläufe: -40 °C bis +85 °C
- Massenströme: bis zu 200 g/s
- Betankungsdauer: 10–15 Minuten
Ein besonderer Fokus lag auf der thermischen Belastung des Systems. Der Temperaturanstieg im Fahrzeugtank – insbesondere beim schnellen Überströmen – kann zu kritischen Temperaturspitzen führen, die Materialien belasten und die Sicherheit beeinträchtigen und somit zum Abbruch des Vorgangs führen. Werden diese kritischen Temperaturspitzen erreicht, bevor der Fahrzeugtank vollständig gefüllt ist, führt dies darüber hinaus zu einer Einschränkung der Reichweite. Dabei ist die Betankungszeit keine festgelegte Vorgabe, sondern ergibt sich unmittelbar aus der Einhaltung der Bauteilgrenzen in Bezug auf Temperatur und Druck. Ziel ist es stets, den gewünschten Zieldruck vor Erreichen der maximal zulässigen Temperatur zu erreichen – und dies möglichst schnell. Daraus wird auch ersichtlich, welche Potenziale bestehen, um die Betankungszeit durch optimierte Strategien weiter zu verkürzen.
Die in der Betankungsstrecke verbauten Komponenten beeinflussen die genannten Zustandsgrößen im Wesentlichen durch ihre Geometrie und somit durch ihr Strömungsverhalten. Zwei Schlüsselkomponenten wurden aufgrund ihrer Komplexität im Detail untersucht, um deren Einfluss auf den Betankungsvorgang genauer zu erkennen:
- Receptacle: Die Schnittstelle zwischen Tankstelle und Fahrzeug – stellt das fahrzeugseitige Gegenstück zum Zapfhahn dar (siehe Abbildung 1).
- On-Tank-Valve (OTV): Das Ventil am Fahrzeugtank – ermöglicht Befüllung und Entnahme des Wasserstoffs (siehe Abbildung 1).
Untersucht wurden alternative Bauteile mit verbessertem Durchflusskoeffizienten. Dabei sollten u. a. folgende Fragen beantwortet werden:
- Wie stark kann die Betankungszeit reduziert werden?
- Wie verändert sich die Temperatur am Ende der Betankung im Tanksystem?
- Sinkt sie durch den reduzierten Joule-Thomson-Effekt?
- Steigt sie durch den höheren Massenstrom?
Optimierung des Receptacles
Durch den Einsatz eines Receptacles mit verbessertem Durchflusskoeffizienten (Faktor 4,5) konnten – wie in Abbildung 3 dargestellt – signifikante Verbesserungen erzielt werden.
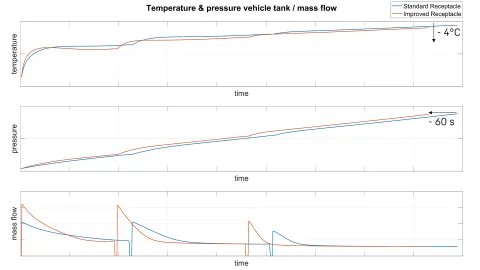
Die wichtigsten Ergebnisse der durchgeführten Simulation:
- Reduktion der Betankungsdauer um 60 Sekunden und gleichzeitige
- Senkung der Endtemperatur im Fahrzeugtank um 4 °C
Die Simulation zeigte, dass das Receptacle ein maßgebliches Nadelöhr des Systems darstellt. Durch den höheren Massenstrom kann der Fahrzeugtank schneller auf seinen Zieldruck gefüllt werden, ohne dabei eine kritische Temperatur im Tank zu erreichen bzw. kann die Endtemperatur sogar gesenkt werden. Bei gleichbleibender Pumpenleistung führt eine Verkürzung der Betankungszeit darüber hinaus zu einer Verringerung des Energiebedarfs für die Betankung. Ein höherer Durchflusskoeffizient hat somit einen signifikanten Einfluss auf Effizienz und Temperaturentwicklung.
Analyse des On-Tank-Valves
Auch beim OTV wurde eine Variante mit verbessertem Durchflusskoeffizienten (Faktor 1,6) untersucht, wobei als Basis das System mit verbesserten Receptacle aus der vorhergehenden Betrachtung gilt. Die Ergebnisse sind in Abbildung 4 dargestellt.
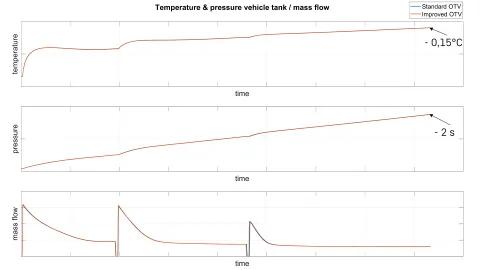
Es zeigten sich nur geringe Unterschiede. Das bedeutet, dass die Adaption des OTV im Gesamtsystem einen deutlich geringeren Einfluss auf den Betankungsvorgang hat als das Receptacle. Dies lässt sich vor allem auf folgende Gründe zurückführen:
- Am OTV strömt nur etwa ein Drittel des Massenstroms durch, da dieser gleichmäßig auf die in diesem Beispiel betrachteten drei Tanks verteilt wird. Dadurch entstehen von vornherein deutlich geringere Druckverluste als am Receptacle. Zusätzlich ist die Druckdifferenz im Standardbauteil bereits sehr gering, sodass eine Anpassung hier kaum Einfluss auf die Betankungszeit hat.
- Im Gegensatz zum Receptacle wurde der Durchflusskoeffizient nicht um den Faktor 4,5, sondern lediglich um den Faktor 1,6 verbessert.
Ein oft unterschätzter Einfluss auf die oben beschrieben Zustandsgrößen bei der Wasserstoffbetankung ist der Zustand des Fahrzeugtanks vor der Befüllung. Dieser hängt stark von der vorherigen Nutzung bzw. Entleerung des Tanks und den Umgebungsbedingungen ab:
- Sonneneinstrahlung erhöht die Tanktemperatur – erschwert die Befüllung.
- Hoher Verbrauch vor der Betankung kühlt den Tank – erleichtert die Befüllung.
Unter Annahme eines klassischen 1-Schicht-Betriebs beeinflusst die Tageszeit die Umgebungsbedingungen:
- Morgens: niedrige Außentemperatur, lange Standzeit über Nacht und somit Angleich von Tank- an Außentemperatur
- Mittags: moderate Außentemperatur, vorheriger Verbrauch wirkt jedoch kühlend auf den Tank
- Nachmittags: hohe Außentemperatur, aber ebenfalls Kühlung des Tanks durch Nutzung
Mithilfe von Flottendaten konventioneller Maschinen lassen sich diese Einflüsse simulieren und der Ausgangszustand vor der Betankung bestimmen. Abbildung 5 zeigt exemplarisch die Ergebnisse für eine tägliche Betankung um 12:00 Uhr. Dabei wurden Wasserstoffentnahme, Stehzeiten und Umgebungsbedingungen für eine Vielzahl von Maschinen und Arbeitstagen berücksichtigt. Dargestellt ist die Häufigkeit der unterschiedlichen Ausgangszustände vor der Betankung.
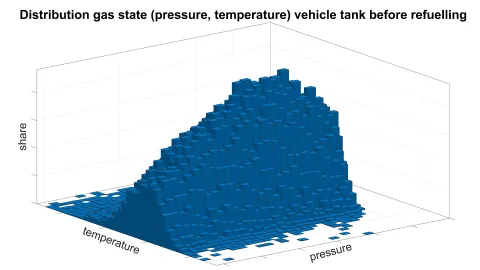
Es ist eine sehr starke Varianz von Starttemperatur und -druck erkennbar was in weiterer Folge zu Unterschieden im Betankungsvorgang und Endzustand führen wird. Ziel ist zu erkennen, unter welchen Startbedingungen von Temperatur und Druck gewisse Zustandsgrößen ihre Grenzen überschreiten oder die Betankungszeit verlängert werden muss. Darüber hinaus lässt die Flottenbetrachtung zu, Wahrscheinlichkeiten zu bestimmen, wann ein Tankvorgang die Anforderungen nach Temperatur, Druck und Zeit erfüllt und wann nicht. Die Simulation ermöglicht es diese Vielzahl an Anfangszuständen systematisch und automatisiert durchzurechnen und in geeigneter Art und Weise darzustellen.
Die Grundlage für die vorgestellten Analysen bildete das Simulationswerkzeug CRUISE M – eine modulare, multidisziplinäre Plattform zur Modellierung komplexer Energiesysteme. Die Software ermöglichte es, das gesamte mobile Wasserstoffbetankungssystem als durchgängiges thermodynamisches Modell abzubilden – inklusive aller relevanten Komponenten wie:
- Wasserstoffspeicher (700 bar)
- Fluidtank und Pumpe
- Receptacle und On-Tank-Valve
- Fahrzeugtank mit realitätsnahen Betriebsbedingungen
Dank der flexiblen Modellstruktur ließen sich mit CRUISE M unterschiedlichste Szenarien effizient analysieren – von Standardbetankungen bis hin zu Varianten mit geänderten Komponenten oder Anfangszuständen sowie verschiedenen Betankungsabläufen oder Strategien.
Vorteile der Simulation mit AVL CRUISE™ M
- Schnelle Iteration: Änderungen an Komponenten oder Betriebsparametern konnten direkt im Modell umgesetzt und analysiert werden.
- Thermodynamische Tiefe: Die präzise Abbildung von Druck-, Temperatur- und Massenstromverläufen in Abhängigkeit des verwendeten Mediums Wasserstoff und dessen Realgasverhaltens ermöglichte eine fundierte Bewertung der Systemeffizienz.
- Integration realer Daten: Flotten- und Umgebungsdaten konnten direkt in die Simulation eingebunden werden, um realitätsnahe Anfangszustände zu modellieren.
- Validierung von Design- und Konzeptentscheidungen: Die Auswirkungen von Komponentenvariationen (z. B. Receptacle mit höherem Durchfluss) konnten quantifiziert und mit bestehenden Lösungen verglichen werden.
Die mobile Wasserstoffbetankung stellt hohe Anforderungen an Technik, Sicherheit und Effizienz. Durch simulationsgestützte Entwicklung mit CRUISE M können diese Herausforderungen identifiziert und zielgerichtet gelöst werden. Die vorgestellte Methodik zeigt:
- Receptacle als dominanter Engpass: Die Optimierung dieser Schnittstelle bringt den größten Effizienzgewinn.
- Simulation ersetzt aufwendige Feldtests: Viele Szenarien lassen sich virtuell abbilden – schneller, sicherer, kostengünstiger.
- Anfangszustände sind entscheidend: Die Berücksichtigung realer Betriebsbedingungen ist unerlässlich für eine praxistaugliche Auslegung.
Stay tuned
Don't miss the Simulation blog series. Sign up today and stay informed!
Da PEM-Brennstoffzellen im Schwerlastverkehr und in der Luftfahrt immer mehr an Bedeutung gewinnen, stehen die Entwicklungsteams unter wachsendem Druck, Systeme zu entwickeln, die die ehrgeizigen Ziele in Bezug auf Leistung, Haltbarkeit und Effizienz erfüllen.
SIMpulse steht für innovative Einblicke in die sich ständig weiterentwickelnde Landschaft der Simulationstechnologie. In dieser Veranstaltungsreihe beleuchten unsere Experten diverse Anwendungsbereiche von Simulation, angefangen beim Automobildesign bis hin zum Energiesektor und darüber hinaus.
Folgen Sie unserem Simulation-Blog
Bleiben Sie auf dem Laufenden mit unserer Simulation-Blogreihe – jetzt anmelden!