

Designoptimierung zur Minimierung der Auswirkungen von Flüssigkeitsschwappen in einem Tankwagen mit PreonLab 6.2
Veröffentlicht: April 02, 2025 · 4 Min. Lesezeit

Wenn äußere Kräfte auf einen teilweise mit einer Flüssigkeit gefüllten Behälter wirken, kann diese aufgrund ihrer Massenträgheit beginnen zu schwappen. Im Automobilbereich wird dies häufig bei Kraftstofftanks oder Flüssigkeitstransportsystemen beobachtet. In der Regel wird ein solches Schwappen durch eine Beschleunigung oder ein Abbremsen des Fahrzeugs ausgelöst. Außerdem kann es aufgrund der Wechselwirkung zwischen Rädern und Fahrbahn auf unebenem Untergrund, Neigungsänderungen entlang der Straße, Kurvenfahrten oder sogar durch Motorvibrationen auftreten.
Während die Flüssigkeit innerhalb des Behälters schwankt und spritzt, kann übermäßiges Schwappen extreme Schwankungen von Druck und Schwallkräften innerhalb des Behälters nach sich ziehen.
Diese unerwünschte Belastung kann zu einem erhöhten Verschleiß des Tanks und weiteren Elementen wie beispielweiße den Verbindungspunkten zwischen Tank und Anhänger führen. Darüber hinaus kann unkontrolliertes Schwappen bei Fahrzeugen, Schiffen und Flugzeugen zu einer Verschiebung des Massenschwerpunkts führen und je nach Flüssigkeitsmenge und Ausmaß des Schwappens, das Fahrverhalten und die Steuerung negativ beeinflussen. Daher ist ein umfangreiches Verständnis über das Schwappverhalten bei der Konstruktion von Kraftstofftanks und großen Flüssigkeitsbehältern von entscheidender Bedeutung. Mit Hilfe virtueller Einblicke kann sowohl das Schwappverhalten besser verstanden werden als auch die anschließende Verwendung von Schwallblechen und Dämpfern zur Dissipation der kinetischen Energie und zur Minimierung von Schwallkraft- und Druckschwankungen festgelegt werden.
Simulationen mit PreonLab sind schnell und effizient, doch was bedeutet das genau?
PreonLab ist eine gitterfreie Simulationssoftware, die im Gegensatz zu traditionellen CFD-Methoden keine komplexe Vernetzung der Geometrien vor der Simulation benötigt. Dies reduziert die Simulationsvorbereitungszeit und ermöglicht selbst unerfahrenen Benutzern einen schnellen Einstieg in die Simulation, ohne über vertiefte Kenntnisse und Erfahrungen in der Netzgenerierung verfügen zu müssen. Die Software bietet eine intuitive Benutzeroberfläche sowie die Möglichkeit, mehrere Designiterationen mit Hilfe von Automatisierungswerkzeugen wie der Python-basierten API - PreonPy – zu simulieren. Dies ermöglicht schlanke Workflows, nicht nur innerhalb einer Simulation, sondern auch bei der Simulation verschiedener Designvarianten sowie bei der Durchführung von Parameterstudien.
PreonLab ist zudem außergewöhnlich schnell in der Berechnung. Der PreonSolver basiert auf dem impliziten Smoothed-Particle-Hydrodynamics (SPH) -Ansatz und kombiniert die numerische Robustheit gitterbasierter Methoden mit den Vorteilen netzfreier Ansätze und ermöglicht große Zeitschritte (CFL 1) während der Simulation. Darüber hinaus sorgen Features wie „Adaptive Timestep“ dafür, dass der Zeitschritt automatisch dynamisch angepasst wird. Hierdurch wird die numerische Stabilität der Lösung erhalten bei gleichzeitiger Steigerung der Effizienz. Dank fortschrittlicher Algorithmen zur adaptiven Partikelgröße wie CPS, um die Anzahl der Rechenoperationen zu reduzieren, ist die Software insbesondere für große Simulationen geeignet. Zusätzlich bietet die Software multi-GPU- und MPI-Unterstützung, um parallele Berechnungen für eine schnellstmögliche Simulation zu ermöglichen.
Selbstverständlich sind schnelle Ergebnisse allein nicht genug. Die Simulationen müssen präzise sein und die Fahrzeug- und Strömungsdynamik ausreichend erfassen können.
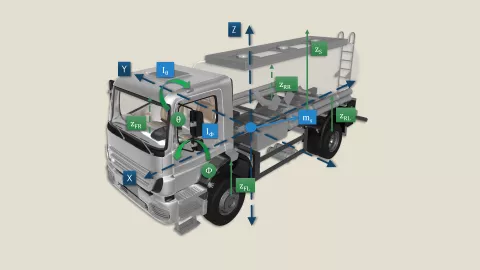
PreonLab bietet mit dem Full Car Suspension Model (FCSM) eine Möglichkeit, die Federung des Fahrzeugs bei der Simulation zu berücksichtigen. Somit kann die Bewegung der gefederten Masse des Fahrzeuges relativ zu den ungefederten Teilen wie den Rädern abgebildet werden. Mit FCSM werden die Federkräfte für jedes Rad einzeln berechnet. Dabei wird sowohl der Einfluss der Fluidkräfte und Hangabtriebskräfte als auch die Trägheitskräfte durch Beschleunigung Verzögerung und Interaktion mit der Straße berücksichtigt. Abbildung 1 zeigt ein vereinfachtes Modell der Verschiebungen und Rotationen, die derzeit mit FCSM berücksichtigt werden. Dazu gehören vertikale Auslenkung für jedes Rad sowie die vertikale Verschiebung der Aufbaumasse und dessen Drehung um die Nick- und Rollachse aufgrund von Trägheitsmomenten.
Abbildung 1: Vereinfachte Darstellung der Freiheitsgrade, die derzeit mit FCSM berücksichtigt werden.
Video 1: Tanklastwagen fährt mit FCSM über trockene Schlaglöcher
Dadurch ist es möglich, das Fahrverhalten über unebenes Gelände, Steigungen und Gefälle und sogar Schlaglöcher zu simulieren. Ein Beispiel davon wird in Video 1 gezeigt. In dem Video ist eine Simulation zu sehen, in der ein Tankwagen über trockene Schlaglöcher fährt. FCSM ermöglicht nicht nur die Durchführung von präzisen Simulationen für eine Vielzahl von Szenarien, sondern hilft auch, umfassende Erkenntnisse über die Auswirkungen von Konstruktionsänderungen auf die Federung zu gewinnen. Für die Verwendung von FCSM mit PreonLab ist keine zusätzliche Software oder Lizenz erforderlich, was eine nahtlose Integration in den Simulationsworkflow gewährleistet.
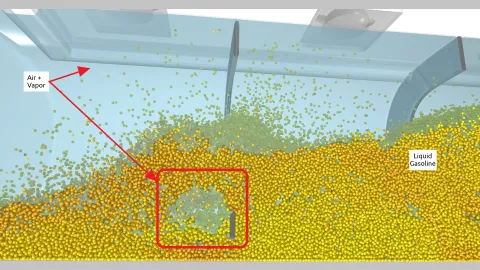
Erfahrungsgemäß sind einphasige Simulationen zwar nützlich, um schnelle Simulationen des Flüssigkeitsschwappens durchzuführen, allerdings ist es empfehlenswert mehrphasige Simulationen durchzuführen, um umfassende Aspekte des Schwappverhaltens erfassen zu können. Daher wurden für diesen Artikel mehrphasige Simulationen durchgeführt. Dabei wird das Benzin als eine Phase berücksichtigt, und das Gemisch aus Luft und Benzindampf als die zweite Phase. Dies kann besonders vorteilhaft sein, um ein ausgeprägtes Schwappverhalten zu simulieren und Phänomene wie den Gaseinschluss in der Flüssigkeit, wie in Abbildung 2 dargestellt, zu beobachten. Obwohl das Dichteverhältnis im Fall von Benzin und dem Gemisch aus Benzindampf und Luft bemerkenswert hoch ist (in der Größenordnung von 10^3), kann durch eine geeignete Modellierung der Oberflächenspannung (CSS) die Simulation erfolgreich in PreonLab durchgeführt werden.
Im Folgenden wird das Schwappverhalten für drei verschiedene Tankdesigns untersucht.
Hinweis: Die in diesen Simulationen verwendeten Lkw- und Tank Geometrien sind repräsentative Geometrien, die zu Demonstrationszwecken verwendet wurden.
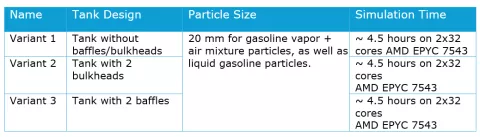
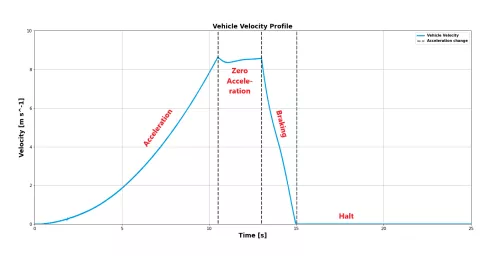
Für alle drei in Tabelle 1 aufgeführten Simulationsvarianten wurde die Simulation für 25 Sekunden physikalischer Zeit durchgeführt, unter Verwendung identischer Simulationseinstellungen. Die einzigen Unterschiede liegen im Tankdesign. Das Fahrprofil des Lkws sowie die Feder- und Dämpfereigenschaften wurden in FCSM als User-Input eingegeben. Für diese Simulationen wurde das Fahrprofil als Beschleunigungsprofil definiert. Das verwendete Beschleunigungsprofil ist in vier verschiedene Phasen unterteilt, wie in Abbildung 3 zu sehen ist.
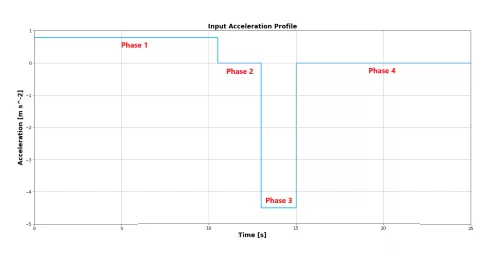
Zunächst wird der Lkw in den ersten 10,5 Sekunden mit 0,8 m/s^2 beschleunigt. Danach wird die Beschleunigung auf null gesetzt, so dass das Fahrzeug 2,5 Sekunden lang im Leerlauf fährt. In Phase drei wird der Lkw mit 4,25 m/s^2 verzögert, um ein starkes Bremsmanöver zu simulieren und ihn innerhalb von 2 Sekunden zum Stillstand zu bringen. In Phase vier, d.h. nachdem der Lkw zum Stillstand gekommen ist, wird er nicht weiter beschleunigt oder abgebremst. Das resultierende Geschwindigkeitsprofil ist in Abbildung 4 dargestellt. Der Lkw wird in der ersten Phase allmählich auf eine Geschwindigkeit von 8,5 m/s beschleunigt. Danach behält das Fahrzeug 2,5 Sekunden lang eine annähernd konstante Geschwindigkeit in Höhe von 8,5 m/s bei. Schließlich wird der Lkw für 2 Sekunden stark abgebremst und kommt dabei zum Stillstand. Es ist zu beobachten, dass die Geschwindigkeit in der zweiten Phase nicht ganz konstant ist. Außerdem ist das Geschwindigkeitsprofil beim Beschleunigen und Bremsen nicht vollständig linear. Dies liegt daran, dass FCSM zusätzlich zum vordefinierten Beschleunigungsprofil auch die Schwallkräfte im Tank berücksichtigen kann. Die Schwallkraftschwankungen, die sich durch den Beschleunigungsänderungen ergeben, wirken sich signifikant auf das Geschwindigkeitsprofil und das Fahrverhalten des Lkws aus.
Wie in Tabelle 1 aufgeführt, unterscheiden sich die drei Varianten in ihrer Konstruktion durch die Verwendung von Trennwänden oder Schwallblechen. Die Tankkonstruktion in Variante 1 hat keine Schwallbleche oder Trennwände, welche die unidirektionale Flüssigkeitsbewegung durch den gesamten Tank umleiten. Bei Variante 2 werden zwei Trennwände verwendet, die den Tank in drei kleinere Zonen unterteilen. Typischerweise führt dies zu einer Dämpfung der Flüssigkeitsströmung und einer Verringerung übermäßiger Schwallkraft- und Druckschwankungen über den gesamten Tank. Allerdings ist aufgrund des geringeren Abstands zwischen den Wänden, eine erhöhte Schwappfrequenz zu erwarten. Variante 3 wird mit zwei Schwallblechen anstelle der Trennwände simuliert. Dadurch wird die Flüssigkeit im Tank nicht in einer Zone isoliert und kann sich zwischen den drei Zonen bewegen. Die Strömung wird jedoch im Gegensatz zur unidirektionalen Flüssigkeitsbewegung entlang der Länge des Tanks durch die Schwallbleche unterbrochen, so dass die daraus resultierende turbulente Bewegung die Schwallkräfte reduzieren kann.
Simulationsergebnisse
Die Simulationsergebnisse sind in den Videos 2, 3 und 4 für die Varianten 1, 2 bzw. 3 dargestellt. Das flüssige Benzin wird als gelblich-goldene Flüssigkeit und das Gemisch aus Luft und Benzindampf als durchscheinende gelbe Flüssigkeit wiedergegeben. Die wichtigsten Simulationsergebnisse werden anschließend analysiert und Schlussfolgerungen bezüglich der Designunterschiede zwischen den drei Varianten gezogen.
- Schwallkraft in X-Richtung
Einer der wichtigsten Ergebnisse, um das Schwappverhalten der Flüssigkeit in den drei Simulationsvarianten zu verstehen ist die Analyse der gesamten Schwallkraft, die auf den Tank und gegeben Falls den Trennwänden bzw. Schwallblechen wirkt. In Abbildung 6 ist die X-Komponente der Schwallkraft, d.h. die Komponente in Fahrtrichtung, die auf den Tank und den Trennwänden bzw. Schwallblechen wirkt, für die drei Simulationsvarianten dargestellt. Positive Werte bedeuten, dass die Kraft in positiver X-Richtung, d. h. in Fahrtrichtung, wirkt, während negative Werte Kräfte in umgekehrter Richtung bedeuten.
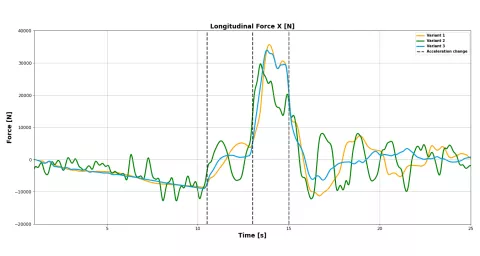
Es ist klar erkennbar, dass die Größenordnung der Schwallkraft bei allen drei Varianten ähnlich ist. Allerdings ist in der Kurve für Variante 2 eine höhere Frequenz der Schwingungen zu beobachten. In allen drei Fällen ist ein Anstieg der Gesamtkraft nach 10,5 Sekunden sowie nach 13 Sekunden zu beobachten. Das sind die Zeitpunkte, an denen sich das Beschleunigungsprofil der Lkws deutlich ändert. Beim Bremsen zwischen 13 und 15 Sekunden zeigt die Kurve für Variante 2 einen niedrigeren Spitzenwert als bei den anderen Varianten. Nach etwa 15 Sekunden in der Simulation sind bei den Varianten 1 und 2 deutliche Schwankungen der Schwallkraft zu erkennen. Obwohl der Lkw aufgrund des Bremsmanövers zum Stillstand gekommen ist, schwappt das Benzin im Tank weiter, was zu diesen Kraftschwankungen führt. Die Schwingungsfrequenz ist bei der Ausführung mit Trennwänden am höchsten.
Im Gegensatz dazu ist die Kurve für Variante 3 deutlich glatter, was dem reduzierten Schwappen im Tank im Vergleich zu den anderen Varianten aufgrund der Schwallblechen entspricht. Dies ist auch in Video 4 zu sehen. Daraus lässt sich ableiten, dass die Verwendung von Trennwänden zwar zu geringeren Spitzenwerten für die Gesamtkraft führen kann, die Verwendung von Schwallblechen innerhalb des Tanks jedoch zu einer Verringerung der auf den Tank wirkenden Schwallkraftschwankungen führt.
- Einfluss des Schwappens auf den Radhub
Ein weiterer wichtiger Aspekt sind die Auswirkungen des Schwappens auf die Radfederkräfte und den daraus resultierenden Radhub. Dieser ist in Abbildung 7a für das rechte Vorderrad und in Abbildung 7b für das rechte Hinterrad dargestellt.
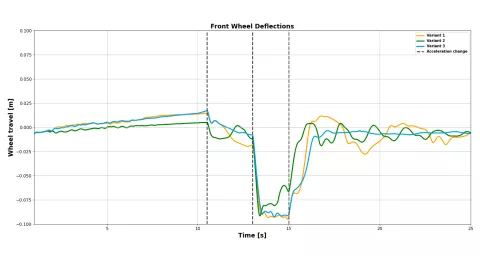
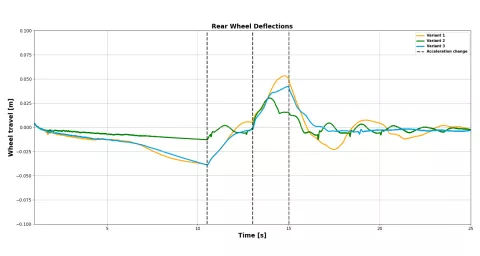
Während der Beschleunigungsphase weist Variante 2 die geringste absolute Auslenkung pro Rad auf, während die Auslenkungen bei Variante 1 und 3 sehr ähnlich sind. Dies lässt sich dadurch erklären, dass bei Variante 1 das Fluid durch die beiden Trennwände in den drei einzelnen Kammern eingeschlossen ist. Dadurch verlagert sich der Gesamtschwerpunkt des Fluids nicht so stark nach hinten wie bei den beiden anderen Varianten. Dies führt zu einer gleichmäßigeren Gewichtsverteilung und damit zu geringerem Radhub.
Nach 15 Sekunden, wenn der Lkw zum Stillstand gekommen ist und das Benzin weiter im Tank schwappt, sind bei Variante 1 und 2 Schwingungen im Radhub zu beobachten, genauso wie bei der Schwallkraft. Die Frequenz der Schwingungen ist bei Variante 2, d. h. bei der Ausführung mit Trennwänden, höher, während die Amplitude der Schwingungen bei Variante 1 größer ist. Im Gegensatz zu diesen beiden Varianten ist die Kurve der Radauslenkungen bei Variante 3, d. h. bei der Ausführung mit Schwallblechen, wesentlich glatter.
Daraus kann gefolgert werden, dass sich die Verwendung von Schwallblechen im Tank auch in dieser Hinsicht als vorteilhaft erweist.
- Visualisierung der Flüssigkeitsgeschwindigkeit
Einer der größten Vorteile der Simulation des Flüssigkeitsschwappens ist die Möglichkeit, verschiedene virtuelle Analysemethoden im Postprocessing anwenden zu können. Es ist nicht nur möglich, den zeitlichen Verlauf von Kräften, Drücken und den Radhüben zu analysieren, sondern auch Details der Flüssigkeitsströmung wie dessen Geschwindigkeit zu visualisieren. In Video 5, 6 und 7 wird beispielsweiße gezeigt, wie die globale Strömungsgeschwindigkeit in Fahrtrichtung für die drei Simulationsvarianten als Partikel visualisiert werden kann. Zusätzlich ist es möglich, die Partikeltrajektorie für einzelne Partikel mit Hilfe des Pathlines Sensors in PreonLab zu visualisieren. Pathlines helfen dabei, den von einzelnen Partikeln zurückgelegten Weg zu veranschaulichen und können für ein noch besseres Verständnis entsprechend ihrer Geschwindigkeit eingefärbt werden. Benutzer können Partikel, die verfolgt werden sollen, durch die Definition eines räumlichen und zeitlichen Bereichs festlegen. Zusätzlich kann die Region basierend auf ihrer Nähe zu einer bestimmten geometrischen Oberfläche in der Simulation spezifiziert werden. In Video 8 sind Pathlines dargestellt, die während der Bremsphase der Simulation mit Hilfe des Pathlines Sensors in PreonLab erzeugt wurden. Die Pathlines wurden für einige Partikel, die sich in der Nähe einer der zwei Schwallplatten in Variante 3 befanden, erzeugt.
Video 8: Video zur Visualisierung der Flüssigkeitsströmung um eines der Schwallblechen in Simulationsvariante 3 mithilfe des Pathlines Sensors in PreonLab.
Mit PreonLab 6.2 ist es möglich, Mehrphasensimulationen durchzuführen, die das Schwappen von Flüssigkeit in einem Tankwagen abbilden. Die Federauslenkungen des Fahrzeugs aufgrund von Beschleunigung und Verzögerung sowie die Auswirkung von Schwallkräften auf das gesamte Fahrverhalten kann mithilfe von FCSM simuliert werden. Die Simulationen können sehr schnell durchgeführt werden und erfordern aufgrund des gitterfreien Ansatzes von PreonLab keine zusätzliche Vorbereitungszeit. Mit Hilfe von einfach zu bedienenden Post-Processing-Tools ist es möglich, umfassende Einblicke in eine Vielzahl von relevanten Ergebnissen zum Fluidverhalten und zur Fahrzeugfederung zu gewinnen. In diesem Artikel wurde das Schwappverhalten für drei verschiedene Tankausführungen simuliert und visualisiert sowie die Schwallkräfte in Fahrtrichtung auf den Tank und die daraus resultierenden Radhubwege analysiert. Bei den drei in diesem Beitrag betrachteten Varianten erweist sich die Tankausführung mit Schwallblechen als die vorteilhafteste, wenn es darum geht, die Kraftschwankungen im Tank zu reduzieren und die Schwingungen des Radhubs, nachdem der Lkw zum Stehen gekommen ist, zu minimieren.
Verpassen Sie keinen Simulations Blog
Melden Sie sich noch heute an und bleiben Sie informiert!
")
Die zunehmende Anzahl unterschiedlicher Fahrzeugmodelle stellt eine steigende Belastung und Herausforderung in der heutigen Fahrzeugentwicklung dar. Die Interaktion des Fahrzeugs mit Regenwasser oder die Fahrtüchtigkeit bei einer Watfahrt müssen häuf
Verpassen Sie keinen Simulations Blog
Melden Sie sich noch heute an und bleiben Sie informiert!