Neben der reinen Simulation spielen cyberphysische Testmethoden eine große Rolle. Der AVL DRIVINGCUBE kombiniert Simulation mit einem fahrbereiten Fahrzeug auf einem Rollen- oder Antriebsstrangprüfstand. Es ist das Ergebnis aus einer Vielzahl von Forschungs- und Industrieprojekten mit dem Ziel, den Validierungs- und Zulassungsprozess von ADAS- und AD-Systemen durch die Verwendung vollautomatisierter und szenario-basierter Tests zu beschleunigen. Dabei soll die Testabdeckung erhöht sowie der Testaufwand verringert werden. Die ganzheitliche Sensorstimulation und die vollumfängliche Automatisierbarkeit mit der Möglichkeit, das Lenksystem realitätsnah betreiben zu können, bringt das Testgelände somit auf den Prüfstand.

Gemeinsam mit Rohde & Schwarz und Stähle haben wir komplett neue Testmöglichkeiten geschaffen. Auf Basis dieser strategischen Zusammenarbeit können wir nun das Lenken am Prüfstand und radar- und GNSS-basierte Funktionen unter sicheren und reproduzierbaren Bedingungen auf Fahrzeugebene testen und validieren. Durch die direkte Stimulation der im Fahrzeug eingebauten Sensoren sind keine Modifikationen am Fahrzeug notwendig.
Der AVL DRIVINGCUBE eröffnet neue Wege, um den Validierungs- und Zulassungsprozess von ADAS- und AD-Systemen zu beschleunigen. Sie profitieren dabei auch von unseren modernsten Testservices, unserem exklusiven Partner-Netzwerk und unserer engen Zusammenarbeit im Bereich der Gesetzgebung und Regularien.
| Komponente | Beschreibung |
|
Radarstimulator |
Frequenz: 76-81GHz, Bandbreite: 4GHz, bis zu 8 Targets, Distanz: 2-300m |
| Dynamic Steering Force Emulator |
Geschwindigkeit: 250mm/s, |
| Kamerastimulator | Verschiedene Lösungen mit Monitoren und/oder Projektion auf Leinwand je nach Fahrzeugkamerasystem |
| GNSS Stimulator | Satellitenmodell in Echtzeit, Stimulation OTA oder über Kabel, Unterstützung von GPS, Gaileo, Glonass, Beidu |
Dynamic Steering Force Emulator
Dieses Modul ermöglicht das Lenken am Fahrzeugprüfstand. Es kann einfach an bestehenden Fahrzeugen integriert werden und emuliert die exakte Kraftrückmeldung der virtuellen Straße. Damit können auch ADAS/AD-Funktionen, welche realistisches Lenken erfordern (z.B. Spurhalteassistenten), am AVL DRIVINGCUBE validiert werden.

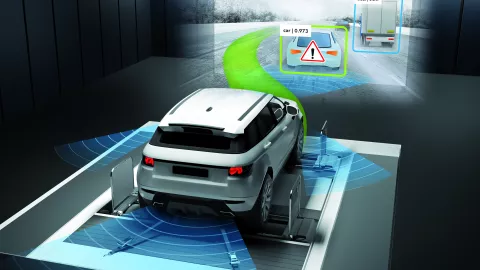
Radarstimulator
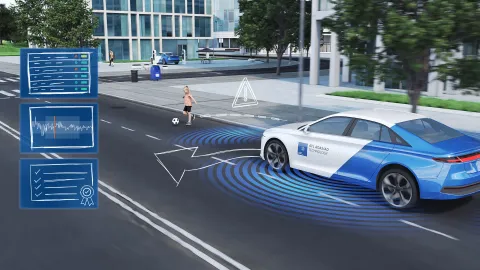
Der Radarstimulator kann komplexe künstliche Objekte für die Radarsensoren mit variabler Entfernung, Radialgeschwindigkeit, Größe und Azimut erzeugen, ohne dass sich Antennen oder Geräte physisch bewegen. Damit können auch anspruchsvolle, komplexe und riskante Fahrszenarien generiert und getestet werden.

Kamerastimulator
Der Kamerastimulator kann Fahrzeugkameras einfach mit OTA-Technik stimulieren, um die ADAS/AD-Funktionstests zu validieren. Dadurch ist kein Zugriff auf die Fahrzeugkamera erforderlich.

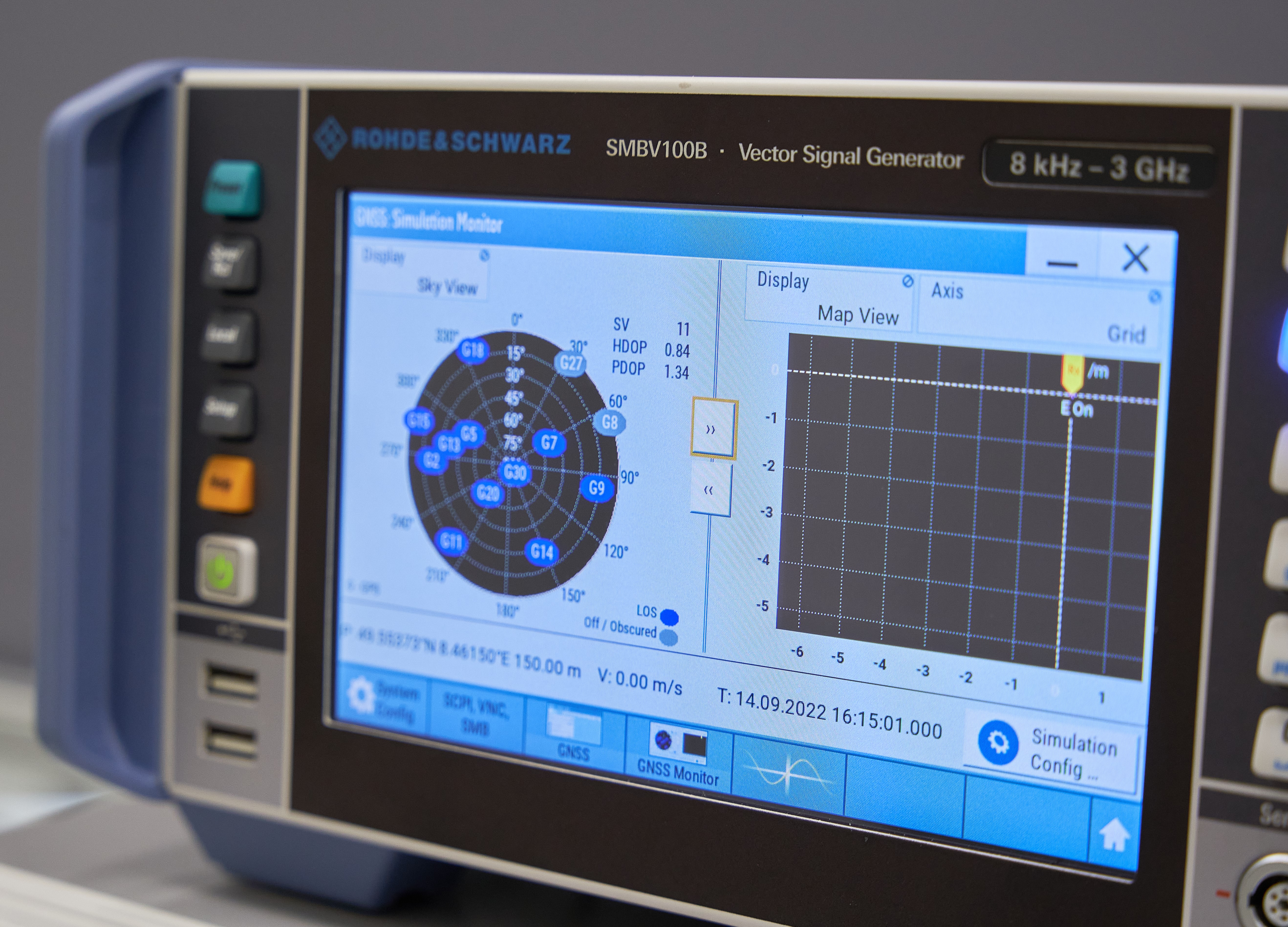
GNSS Stimulator
Damit erfolgt die dynamische Stimulation von GNSS-Receivern, sodass Strecken auf jedem Punkt der Erde am AVL DRIVINGCUBE simuliert werden können. Dabei werden verschiedenen Standards wie GPS, GLONASS, BEIDOU und GALILEO unterstützt.
Der AVL DRIVINGCUBE™ hat sich an der TU Berlin bereits in mehreren Forschungs- und Industrieprojekten als hocheffiziente Testumgebung zur Analyse elektrifizierter und automatisierter Fahrzeuge erwiesen.
– Prof. Dr. – Ing. Steffen Müller, Head of Department Automotive Engineering at the Technical University Berlin
AVL DRIVINGCUBE™ Solution Sheet
AVL Dynamic Steering Force Emulator - Solution Sheet
Solution Sheet (EN)
AVL DRIVINGCUBE™ Success Story
AVL DRIVINGCUBE™ - Methods For Simulation Based Homologation LKAS
AVL DRIVINGCUBE™ Whitepaper
Whitepaper (EN)
SCENIUS bietet einen ganzheitlichen Lösungsansatz für die szenarienbasierte Absicherung von ADAS- und AD-Systemen.

Hochgenaue Messungen dynamischer Umgebungen für die ADAS/AD-Validierung.
Mehr Effizienz für Ihre NCAP (New Car Assessment Program)- und Homologationstests ‒ jetzt und in Zukunft!
Verwerten Sie mit der AVL ADAS/AD Big Data and Analytics Platform™ Ihre Fahrdaten in vollem Umfang.

Testoptimierung von komplexen ADAS/AD- Funktionen um Fahrzeuge schneller auf die Straße zu bekommen.

- EN,
A new way to speed up the validation and approval process of ADAS/AD systems.
![AVL DRIVING CUBE[2]](/sites/default/files/styles/landscape_small/public/pressrelease/Company/PressReleases/Press%20Releases%202020/AVL%20DRIVING%20CUBE%5B2%5D_0.jpg.webp?itok=bFCuIasG "AVL DRIVING CUBE[2]")
GNSS-Signale, wie beispielsweise GPS, sind für die Positionsbestimmung und -verfolgung, zur Orientierung sowie für sicherheitsrelevante Informationen wie Staus etc. von großer Bedeutung im Straßenverkehr. Eine Kooperation zwischen AVL und Rohde & Sch

- EN,
AVL and Rohde&Schwarz have intensified their collaboration with the integration of a Rohde&Schwarz radar test system into the AVL DRIVINGCUBE™.

The integration of ADAS/AD systems into vehicles moves forward.But what needs to be considered when developing and validating these systems? You will receive answers to these questions and gain insights into application examples in this webinar!

Ready to combine the best of two worlds?The demand for ADAS/AD testing and validation in simulation and real world is increasing rapidly due to the growing number of ADAS/AD functions and vehicle variants.