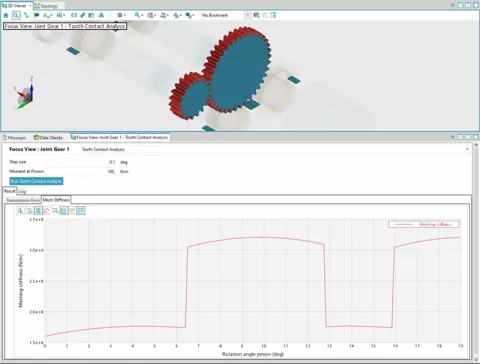
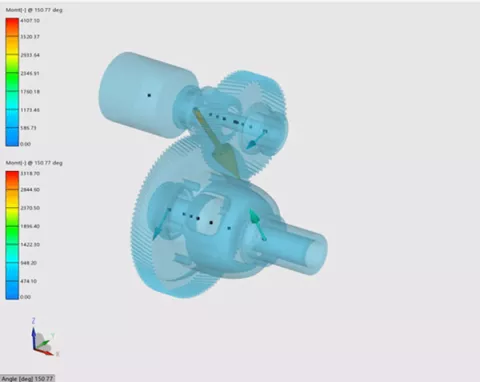
標準ギアボックス-NVH、最適化/DoEタスクなどの用途シナリオについては、AVL EXCITE™ Mでより高速な、新しい周波数領域ソリューション(FDS)を利用できます。よく知られた時間領域ソリューション(TDS)の代替として、あるいはそれを補足するものとしてFDSを利用できます。eアクスルの周期的励振に関連する発生源は、ギアの加振力です。ギア加振力の計算には、分析的歯当たり解析(TCA)が利用されます。
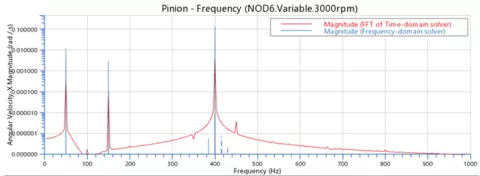
このソリューションは、解析された周波数における、あらゆるノードボディモーション量(すなわち、変位/速度/加速度)の結果を提供します。
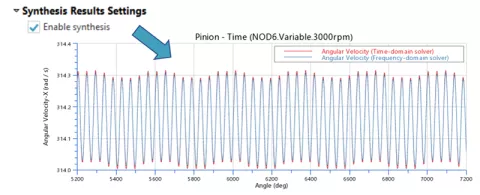
他の座標系で結果を表示するため、角度/時間領域での結果の合成に対応しています。
グラフベースでの表現に加えて、3DのFDS結果を以下の2つの異なる方法でアニメーション化するオプションが追加されています。
- ・単一周波数でのボディモーションによる(ノード量のデータ復元を含む)
- ・単一周波数の組み合わせを表すボディ結果を、時間と角度の等価信号に合成することによります
単純な制御システム機能をモデル化する複数の新要素が提供されています。シリンダー圧力の適用(スロットル位置の変更など)や駆動システムでの切り替え動作の実行(クラッチの作動など)といったシステム挙動に影響を与え、制御することができます。
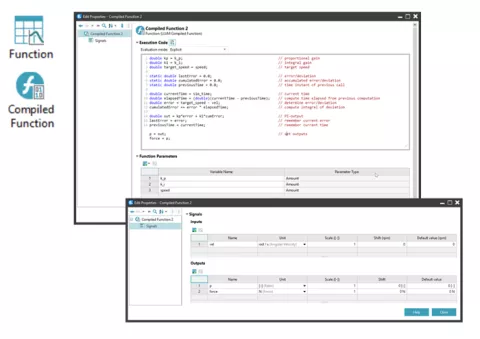
また、C言語をコンパイル済みの関数という形で統合できるため、基本的な制御機能(PI制御器など)を組み込むことができます。外部ツールとのコシミュレーションは不要になりました。
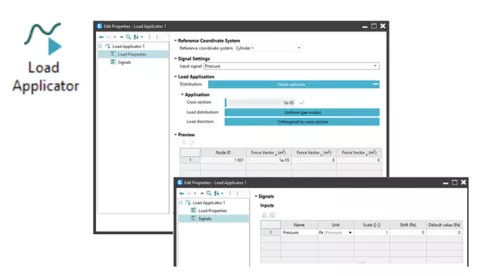
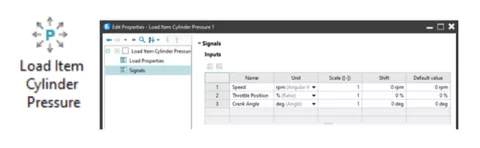
もう一つのイノベーションは信号と制御に関するものです。AVL EXCITE™ Mのグラフィカルフロントエンドで、以下の最初のコンポーネントセットが提供されるようになりました。Load ApplicatorおよびLoad Item Cylinder Pressure:指定された入力信号に基づいて、ボディノードでの負荷適用(圧力、フォース、モーメントなど)を容易にします。
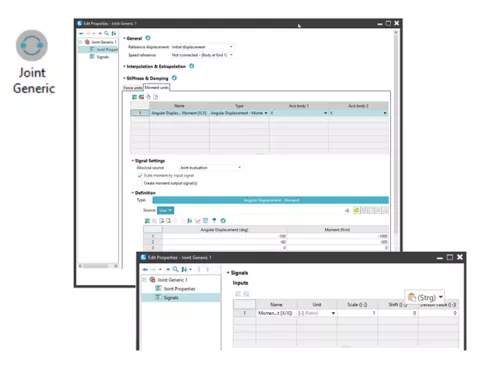
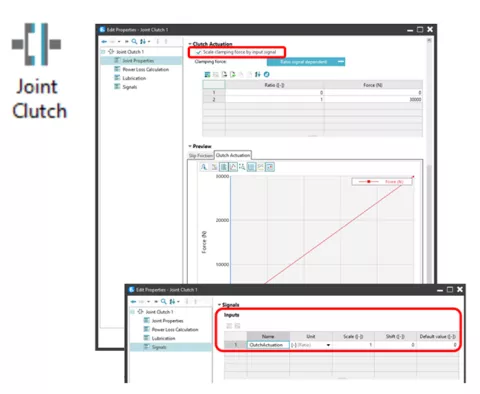
摩擦クラッチ、単純なシンクロナイザーユニット、かみ合いクラッチなどのスイッチング要素のモデル化・作動のため、既存のジョイント機能を拡張しました。この拡張機能には、クランプ力、剛性/減衰に関するジョイント特性が含まれます。これらは、入力信号によって設定・スケーリングできるようになりました。
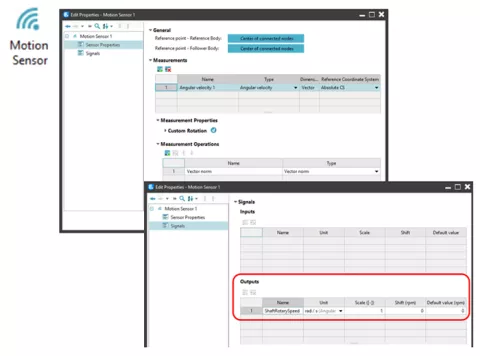
筐体やエンジンブロックに対する特定のノード位置でシャフト/クランクシャフトの回転速度を測定するのは手間がかかります。この新しいコンポーネントを利用すれば、2つのボディのノード間の相対的な並進運動と回転運動を感知・処理できます。また、3Dベクトル測定値をベクトルのノルムやスカラー射影などの単一の信号に変換する基本機能も搭載しています。
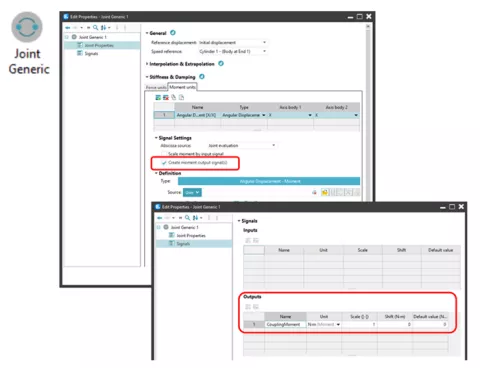
既存のテーブルフォース/モーメントジョイント(FTAB)は、基本的なフォース/モーメント測定タスクを実行するために拡張されています。さまざまなFTABオプションについては、ジョイントが提供する出力信号を介して、結果として得られるフォース/モーメントにアクセスできます。
ユーザーは、AVL EXCITEモデルの任意の入出力信号を受け取り、そのモデルで特定の機能を実行するコードでその信号を使用できます。C言語のコンパイルとAVL EXCITEソルバーへのリンクは自動的に行われ、ユーザーによる操作は不要です。これにより、ユーザーはAVL EXCITEの機能性を大幅に高めて、自らの特定要件を満たすことができます。
新しいコンポーネントを利用し、AVL EXCITE™ MとModel.CONNECT™を接続できるようになりました。任意の数のModel.CONNECT™インターフェースコンポーネントをAVL EXCITE™ Mモデルに自由に追加できます。Model.CONNECT™コンポーネントは、AVL EXCITE™ Mの信号ネットワークの一部です。つまり、交換するすべてのAVL EXCITE™ Mの入出力信号を定義できます。

これまでEXCITEはあらゆる機種に対応する20 kHzの高周波までの音響解析用ジョイントタイプを提供してきました。現在、ジョイントタイプと電流制御器が追加され、トラクションモーターやハイブリッドの用途での低周波問題を解析できるようになっています。
AVL EXCITE™ Mは電気モータージョイントについて以下のアプローチを提供しています。
- マップベース(インポート済みの事前計算されたフォースとモーメント) – ラジアル磁束を持つすべてのeモータータイプで使用可能
- パラメータベース(線形基本波モデル) – PMSM(永久磁石同期モーター)、EESM(外部励起同期モーター)、SCIM(かご形誘導モーター)、SYRM(同期リラクタンスモーター)で使用可能
- ファイルベース – PMSMで利用可能
o 飽和基本波モデル – 電流依存インダクタンスと永久磁石磁束リンケージ用ファイル
o MFC(磁場計算) – 位相間磁束リンケージおよびトルク/固定子の歯の力/ギア歯軸のモーメント用ファイル
- 「軸-軸」:固定子軸ノードに結合された回転子軸ノード(回転子偏心の有無を問わない)
- 「軸-円周」:固定子歯ノードに結合された回転子軸ノード(回転子偏心の有無を問わない)
モーターまたは回復モードでのトラクション用途向けに最新の電流制御技術を搭載した、新しい制御システムがEESMおよびSCIMに導入されています。