
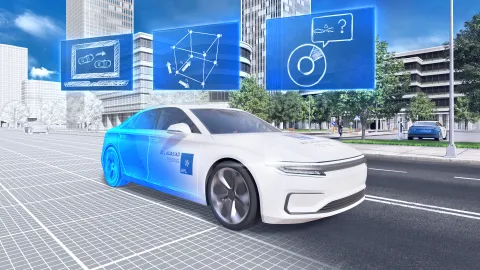
サイバーフィジカルな試験手法は、シミュレーションを超えて重要な役割を果たします。AVL DRIVINGCUBEは、シャーシダイナモメーターやパワートレインのテストベンチ上で、シミュレーションと実走行に耐える車両を組み合わせたものです。DRIVINGCUBEの設計には、数多くの研究や過去のプロジェクトからの経験が取り入れられています。完全自動化されたシナリオベースの試験を利用して試験範囲を広げ、試験工数を削減することで、ADAS/ADシステムの検証・承認を迅速化することが目的です。総合センサースティミュレーションとフルレンジステアリング性能により、テストベンチをテストコースと同等の水準に引き上げます。

| 項目 | 説明 |
|
レーダー・ターゲット・スティミュレーター |
周波数76~81 GHz、帯域幅:4GHz、 |
| ダイナミック・ステアリングフォース・エミュレーター |
作動速度:250mm/s、 |
| カメラ・スティミュレーター |
車両カメラシステムに応じて、モニターおよび/またはキャンバスへの投影機能を備えた各種ソリューション |
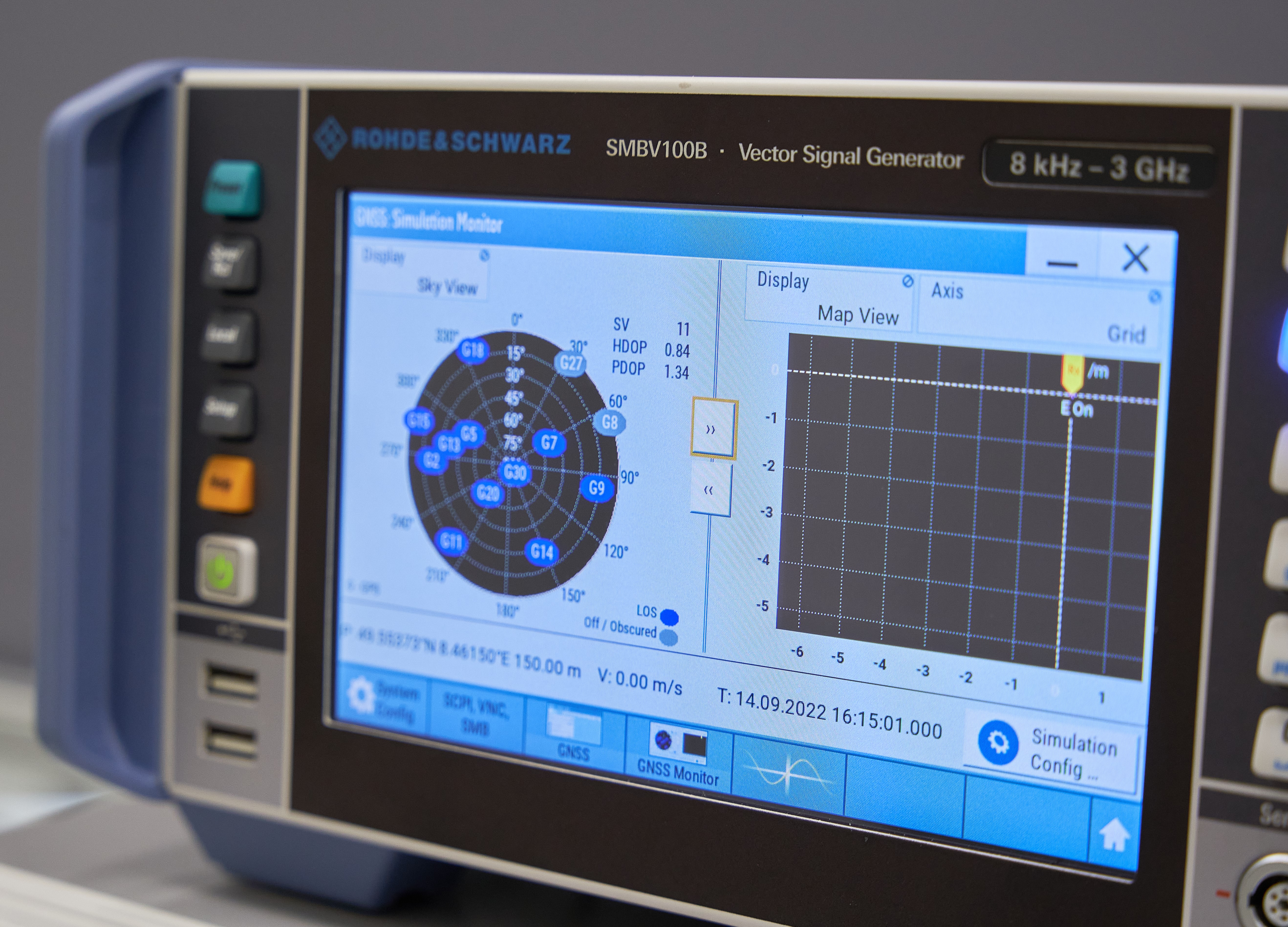
| GNSS スティミュレーター |
リアルタイム衛星モデル、無線またはケーブルでのスティミュレーション、GPS、Gaileo、Glonass、Beiduに対応 |
試験範囲の拡大
ADAS/ADに必要な試験労力を削減
車両レベルでの試験実施
再現性の高い条件
効率的な反復とバリエーション
多様なシナリオと派生車種
安全な動作条件
特にクリティカルな運転シナリオに有効
容易なアップグレード
既存のシャーシダイナモメーターとパワートレインテストベンチ
ダイナミック・ステアリングフォース・エミュレーター
このモジュールは、仮想上の道路から受ける正確な力フィードバックを利用して、ステアリング機能を実行するための後付け拡張モジュールです。車両に装着すると、自動車線維持システムのようにリアルなステアリング操作を必要とするADAS/AD機能の検証に利用できます。

ダイナミック・ステアリングフォース・エミュレーター
このモジュールは、仮想上の道路から受ける正確な力フィードバックを利用して、ステアリング機能を実行するための後付け拡張モジュールです。車両に装着すると、自動車線維持システムのようにリアルなステアリング操作を必要とするADAS/AD機能の検証に利用できます。

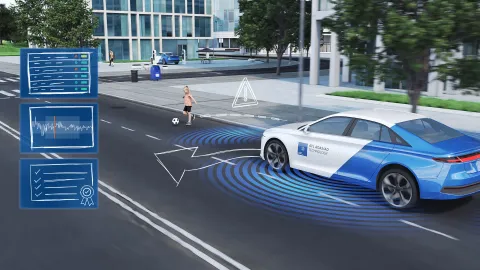
レーダー・スティミュレーター
このレーダーは、試験走行時に車両レーダーセンサーに対して独立して稼働するリアルな目標物を生成します。機械的に稼働するパーツを必要とせず、設置面積も最小限に抑えられます。さまざまな種類のレーダーセンサーを無線でスティミュレーションできます。

カメラ・スティミュレーター
このカメラスティミュレーターは、 ADAS/AD機能試験の検証に必要な車載カメラの無線スティミュレーションを容易に実行することができます。車両カメラに触れる必要はありません。

GNSS スティミュレーター
車両をテストベンチ上で走行させている間は、地球上のあらゆる位置でGNSS(全地球的航法衛星システム受信機)によるダイナミックスティミュレーションを実施できます。GPS、GLONASS、BEIDOU、GALILEOなどの規格に対応しています。
ベルリン工科大学で利用されているAVLDRIVINGCUBE™は、複数の研究・産業プロジェクトにおいて、EV(電動自動車)および自動運転車(AV)の解析を実施する上で、非常に効率的な試験環境として実績があります。
– ベルリン工科大学自動車工学部長 Steffen Müller教授(工学博士)
SCENIUSは、シナリオベースのADASおよびADの安全性試験・妥当性確認に向けた包括的なソリューションです。
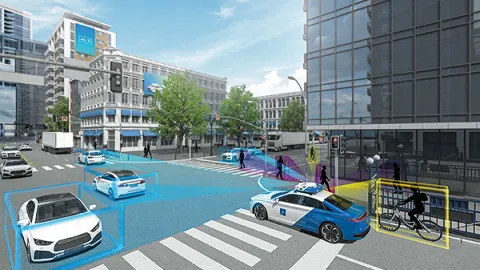
ADAS/AD機能の検証に向けた高精度ダイナミック環境測定
NCAPおよび認証試験を効率化
AVL ADAS/AD Big Data and Analytics Platform™を利用して、実際の交通状況データを最大限に活用
複雑なADAS/ADの機能試験を制御して新車のローンチを加速

- EN,
A new way to speed up the validation and approval process of ADAS/AD systems.

- EN,
AVL and Rohde&Schwarz have intensified their collaboration with the integration of a Rohde&Schwarz radar test system into the AVL DRIVINGCUBE™.

The integration of ADAS/AD systems into vehicles moves forward.But what needs to be considered when developing and validating these systems? You will receive answers to these questions and gain insights into application examples in this webinar!
![AVL DRIVING CUBE[2]](/sites/default/files/styles/landscape_small/public/pressrelease/Company/PressReleases/Press%20Releases%202020/AVL%20DRIVING%20CUBE%5B2%5D_0.jpg.webp?h=b99b46e9&itok=bFCuIasG "AVL DRIVING CUBE[2]")
- EN,
GNSS signals (for example GPS signals) are of major importance for positioning and tracking, orientation and safety-related information, such as congestion, in road traffic.

Ready to combine the best of two worlds?The demand for ADAS/AD testing and validation in simulation and real world is increasing rapidly due to the growing number of ADAS/AD functions and vehicle variants.