信頼できるセンサーシミュレーション ― シミュレーション結果への信頼性をどう確立するか
Published on June 11, 2025 · 10 min read
自動運転車は、LiDAR、レーダー、カメラ、超音波センサーからなる複雑なセンサー群に依存して周囲を認識し、反応しています。これらのセンサーは、雨、雪、霧、トンネル、逆光といったあらゆる環境条件下で確実に動作しなければなりません。
これらすべてのシナリオを実世界で試験することは、高コストであるだけでなく、多くの場合不可能です。だからこそシミュレーションが不可欠となります。しかし、信頼性のないシミュレーションは危険です。実車と同じ挙動を示さないバーチャル車両は、誤解を招く結果やシステムレベルの判断ミスを招く恐れがあります。
信頼できるシミュレーションであるためには、物理的に正確であり、実測データで検証され、前提条件が透明で、さらに Euro NCAP 2026 ロードマップのような基準に準拠している必要があります。
そうでなければ、シミュレーション結果は単なる推測に過ぎません。
Persival はセンサーシミュレーション分野における信頼性の高い技術パートナーです。博士号取得者を含む高度な専門知識を持つエンジニアが、物理ベースモデリングの研究開発に長年携わっており、自動車向けの高度なセンサーシミュレーションを提供しています。
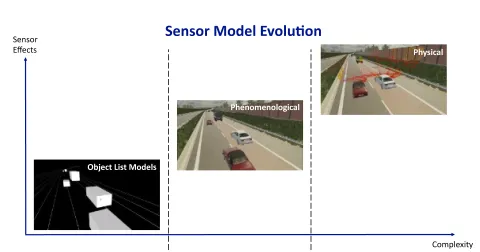
中核となるのは、高精度センサーモデルです。これらのモデルは、センサーと複雑環境との相互作用を再現し、マルチパス反射、気象条件、材料ごとの光学特性に依存するLiDAR信号の挙動など、重要な物理現象を精密に捉えます。この精緻さにより、エッジケースの抽出や極限条件下での知覚システムの挙動解析が可能です。
Persivalのセンサーモデルは、センサー出力や信号交換の共通構造を定義するASAM OSI (Open Simulation Interface) 標準に基づいて構築されています。この標準化されたインターフェースにより、ユーザーは自社の内部信号処理をブラックボックスモデルとして容易に統合できます。これにより、サプライヤーのアルゴリズムに関する専有情報を保護しつつ、完全に統合されたシミュレーションワークフローの利点を享受でき、知的財産の安全性とシステムレベルでのリアリズムの両立が可能となります。
Persivalはまた、ASAM OpenMATERIAL 3D 標準の策定を主導する重要な役割も担っています。この標準規格は、屈折率、誘電率、表面粗さといった材料特性をシミュレーション環境で定義・交換する方法を定義しています。これにより、異なるプラットフォームやツール間でセンサー挙動の一貫性を確保する上で、重要な役割を果たしています。
信頼性を担保するため、Persival は堅牢な検証ワークフローのAvelonを開発しました。AAvelonは実測データとの相関解析や定量的評価指標に基づき、シミュレーション出力と実際のセンサー挙動の整合性を検証します。このプロセスは、安全性評価や規制対応に必要なトレーサビリティと透明性を提供します。
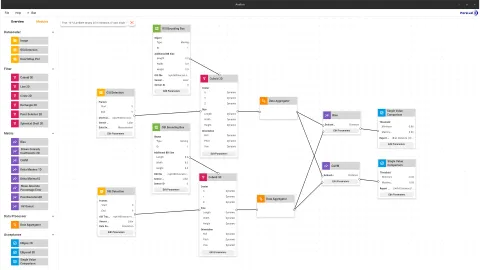
顧客にとってこれは、業界初の体系的アプローチとセンサーモデル検証専用のツールセットを利用できることを意味します。これにより、技術的に確実であるだけでなく、実環境での導入や規制承認にも対応可能なシミュレーションワークフローを構築することができます。
シミュレーションの精度は、車両モデルの物理的妥当性に大きく依存します。バーチャル車両の挙動が実車と一致しなければ、システムレベルの検証結果は有効性を失います。AVL VSM™ (Vehicle Simulation Model) と Vehicle Model Factory は、この課題を解決するために不可欠な要素となります。
VSMは高精度の車両ダイナミクスモデルであり、ステアリング応答、制動特性、サスペンションの非線形挙動、タイヤと路面の相互作用を詳細にモデル化します。これにより、緊急回避操作や低摩擦路面といったエッジケースにおける挙動を高精度に再現できます。

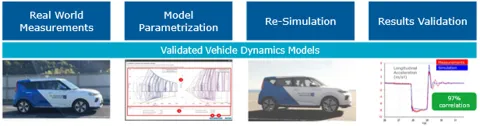
拡張性とカスタマイズ性をサポートするために、AVL は Vehicle Model Factory を提供しています。これは、顧客固有のデータに基づいて検証済みの車両モデルを生成するための合理化されたプロセスです。これには以下が含まれます。
- 車両の形状および質量分布
- パワートレインおよびドライブトレインの特性
- サスペンションおよびステアリングシステムのパラメーター
- タイヤモデルおよび路面特性
各モデルは実験試験から得られた測定データに対して検証されており、実車挙動との相関は最大で 97% に達しています。この高い精度により、開発、検証、認証における解析の信頼性が確保されます。
顧客にとってこれは、制御アルゴリズムの調整、ADAS 機能の検証、あるいは規制対応への準備など、実環境で自社のシステムがどのように挙動するかを自信を持ってシミュレーションできることを意味します。VSM と Vehicle Model Factory は、シミュレーションを開発プロセスで柔軟かつ拡張可能に活用でき、かつ信頼性を確保するための技術的基盤を提供します。
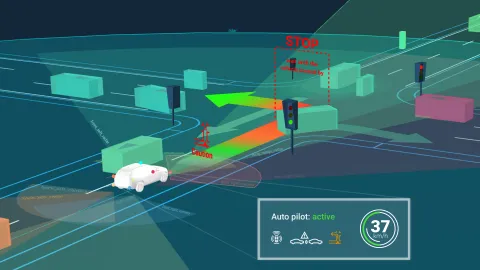
Scenario Simulator は、センサー出力、車両ダイナミクス、環境条件を統合したリアルな走行シナリオをバーチャル環境で再現可能な、包括的なテスト環境です。
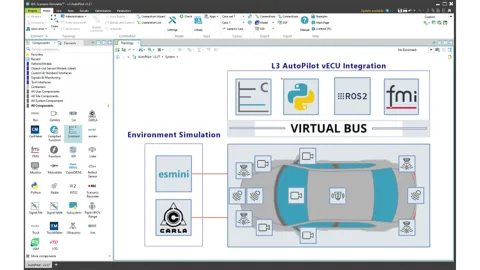
Simulator の大きな強みは、クーロズドループテストに対応している点です。知覚、計画、制御を含む ADAS/ADソフトウェアスタック全体を高精度の車両ダイナミクスモデルと接続でき、バーチャル車両が実世界と同様にシナリオに応答します。これにより、複雑で安全性が求められる状況下でのシステム挙動を評価することが可能になります。
さらに、Scenario Simulatorは、標準化されたオープンインターフェースを採用しており、外部センサーモデルや交通エージェント、開発ツールの統合が容易です。AVL の検証済みモデルを使用する場合でも、外部コンポーネントを組み込む場合でも、プロプライエタリ環境に依存せずに柔軟にワークフローに適応できます。
ユーザーにとって、これは 開発サイクルの迅速化、より現実に即したシステムレベル検証、幅広いシナリオでのスケーラブルなテストの実現を意味します。さらに、トレーサビリティを維持しつつ、進化する安全規格への準拠も確保 できます。
Scenario Simulator とPersivalの検証済みセンサーモデルを組み合わせることで、開発者やエンジニア、安全性担当者にとって強力なツールキットが提供されます。では、この技術を実際にどのように活用できるのでしょうか。
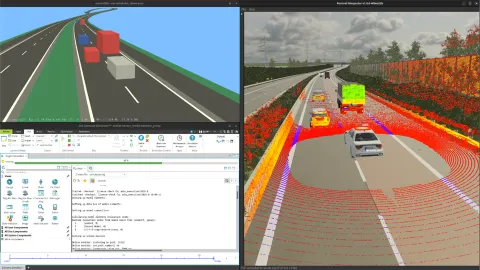
例えば、自動緊急ブレーキシステムを開発している場合を考えます。Scenario Simulatorを使えば、都市部の交差点、高速道路での割り込み、夜間の歩行者など、数百ものテストシナリオを机上で作成可能です。車両の反応、センサーの環境認識、制御システムの応答をバーチャル環境で再現できます。
さらに Persival の検証済みセンサーモデルを組み込むと、バーチャル試験はセンサーの実世界での挙動を忠実に反映します。例えば、霧がLiDARに与える影響、レーダーのマルチパス反射、材料による検知特性の変化などを確認可能です。加えてAvelon を用いれば、シミュレーション結果が実際のデータと整合していることを定量的に証明できます。
このアプローチにより、以下の効果が得られます:
- 物理試験前のエッジケースを早期特定
- 高コストな実車試験走行の回数削減
- 規制当局や認証機関への安全性立証を効率的に実施
- 安全性を損なわずに開発スピードを加速
何より重要なのは、信頼できるシミュレーション結果に基づいて意思決定が可能になることです。
最新の情報をお見逃しなく
シミュレーションのブログシリーズをご覧ください。今すぐ登録して最新情報を受け取りましょう。
Read More About This Topic
本ウェビナーでは、高度なセンサーフュージョンがコストを削減し、物理的なテストをスマートなシミュレーションに置き換える方法をご紹介します。
The fifth part of this online event series focuses on our simulation solutions for automated and connected mobility. Join us and benefit from our know-how of efficient and reliable virtual validation. Hear from industry experts, engage in insightful discussions, and be part of shaping the future of autonomous driving.

こちらの無料ウェビナーでは、シミュレーションの専門家が、仮想環境でADAS(先進運転支援システム)およびAD(自動運転)ソフトウェアを統合・テストするために必要な基本ステップをわかりやすく解説します。

Shorter time-to-market but more scenarios needed for validation? This webinar shows how to overcome these challenges in ADAS development without having to compromise on safety.
完全自動化された大規模ADAS/ADテストを実現するコスト効率の高いソリューション、"AVL Scenario Simulator™"がリリースされました。テストの目的に応じて、最適なバーチャルプロトタイプを構築することができます。
シミュレーションのブログ記事を受け取る
シミュレーションのブログシリーズをご覧ください。今すぐ登録して最新情報を受け取りましょう。