

PreonLab 6.2によるタンカートラック内スロッシング影響軽減のための設計最適化
Published on April 02, 2025 · 4 min read

部分的に液体で満たされたコンテナに外力が作用すると、液体は慣性によってスロッシング (揺れ) を起こすことがあります。自動車業界では、燃料タンクや液体輸送システムで一般的に観測されます。こうした場合、スロッシングは通常、車両の加減速、車輪と路面の相互作用 (路面の凹凸による) 、道路の勾配変化、コーナリング、あるいはエンジン振動などによって誘発されます。
制御されないスロッシングは、液体が容器内で揺れ、跳ねることで、タンク壁に過大な力や圧力変動を引き起こします。長期的には、構造や取り付け部などのコンポーネントが摩耗しやすくなります。さらに、車両・船舶・航空機においては、スロッシングによる重心移動が操縦性や制御性能に悪影響を及ぼすことがあります。そのため、燃料タンクや大型液体コンテナの設計時にはスロッシングの理解が重要であり、バッフルやダンパーを用いて運動エネルギーを吸収し、力や圧力変動を低減することが求められます。
PreonLabによるシミュレーションは高速かつ効率的です。では、それは具体的にどういう意味でしょうか?
PreonLabはメッシュフリーのソフトウェアであり、従来のCFD手法のように複雑なメッシュ作成は不要です。そのため、シミュレーション設定全体の時間を短縮でき、新規ユーザーにとっても参入障壁が低くなります。さらに、直感的なUIやPythonベースのAPI「PreonPy」を用いた自動化によって、複数回のシミュレーション反復や設計バリエーションの解析、パラメータースタディを容易に行うことができます。
PreonLabは計算効率も高く、PreonSolverはグリッドベース手法の数値的堅牢性とメッシュフリーアプローチの利点を組み合わせ、大きなタイムステップ (CFL=1) でのシミュレーションを可能にします。また、適応型タイムステップ機能により、安定性を保ちながら効率的なシミュレーションが可能です。さらに、大規模流体シミュレーション向けに最適化されており、不要な計算を削減する適応解像度、マルチGPUおよびMPIサポートにより並列計算を活用できます。
高速な結果だけでは不十分です。シミュレーションは正確であり、幅広い車両・流体力学現象を捉える必要があります。そのため、マルチフィジックスに対応したツールが求められます。
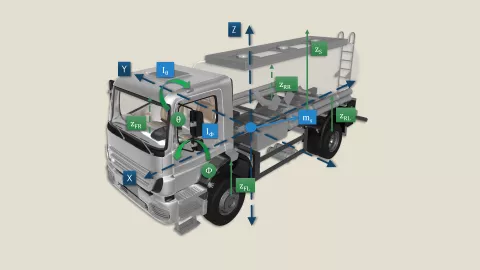
PreonLabにはFull Car Suspension Model (FCSM) が含まれており、車両のばね変位を考慮したシミュレーションが可能です。FCSMでは、各車輪に対する力に基づき、スプリングを介して車体がどのように変位するかを計算します。変位力は各車輪ごとに計算され、流体力、加減速、重量移動、路面の相互作用も考慮されます。図1は、FCSMで許可されている簡略化モデルの変位・回転を示しています。
これにより、路面の凹凸、勾配、カーブ、さらにはポットホール走行などを含む精密なシミュレーションが可能です (動画1参照) 。追加のソフトウェアやライセンスも不要で、FCSMはPreonLabにシームレスに統合されます。
動画1:FCSMを用いたポットホール上を走行するタンカートラック
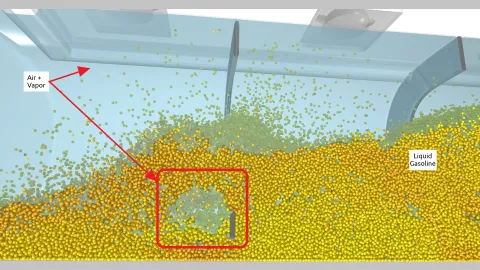
単相シミュレーションでもスロッシング解析は有用かつ高速ですが、多相流シミュレーションを用いることで、スロッシング影響をより正確に評価できます。この記事では、ガソリン液相に加え、タンク内のガソリン蒸気と空気の混合ガス相を考慮した多相流シミュレーションを実施しています (図2参照) 。ガソリンとガソリン蒸気+空気混合物の密度比は高く (10³オーダー)、PreonLabのCSS (Continuous Surface Stress) モデルを用いることで表面張力を考慮したシミュレーションが可能です。
次に、3つの異なるタンク設計についてスロッシング現象を解析します。
注:使用されるトラックおよびタンクのジオメトリは、デモンストレーション用の代表的な形状です。
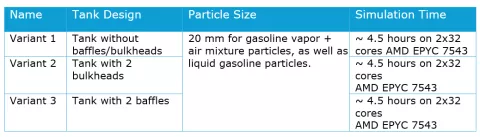
3つのバリエーションについて、タンク設計以外は同一の条件で25秒間の物理時間シミュレーションを実施します。トラックの軌跡とサスペンション特性はFCSMに入力されます。軌跡は加速度プロファイルとして定義され、4つのフェーズに分かれています (図3参照) 。
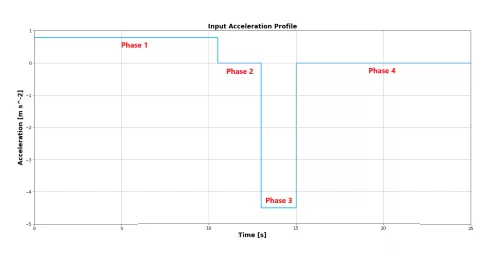
フェーズ1では、トラックは0.8 m/s²で加速し10.5秒後に加速を停止、2.5秒間ほぼ一定速度で走行します。フェーズ3では4.25 m/s²で減速し、2秒以内に停止します。フェーズ4では停止後、加減速は行いません。
結果として得られる速度プロファイルは図4の通りです。トラックはフェーズ1で8.5 m/sまで徐々に加速し、2.5秒間ほぼ一定速度を維持します。その後、フェーズ3で急激に減速し、トラックは停止します。
なお、第2フェーズにおける速度は完全には一定ではありません。また、加速および減速フェーズにおける速度変化は厳密な直線ではありません。これは、FCSMがタンク内流体スロッシングによる力を考慮しており、事前に設定した加速度プロファイルに加えて車両の挙動に影響を与えるためです。スロッシングによる力の変動は、トラックの速度プロファイルや操縦性に顕著な影響を及ぼします。
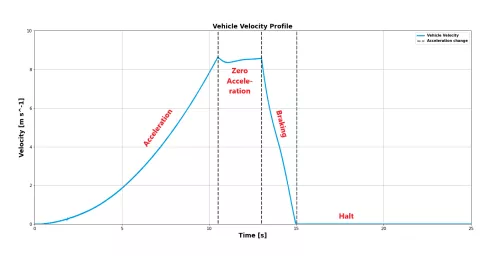
表1に示したように、3つのバリエーションはタンク設計が異なります。違いは主にバルクヘッドやバッフルの使用にあります。
Variant 1:タンク内にバルクヘッドやバッフルはなく、液体はタンク全体で一方向に移動します。
Variant 2:2つのバルクヘッドによりタンクを3つの区画に分割します。通常、これにより液体の流れが分断され、タンク全体の力や圧力変動が低減されるほか、壁間距離が短いためスロッシング周波数は増加します。
Variant 3:2つのバッフルを設置します。液体は3つの区画に完全には分断されませんが、バッフルによって流れが乱され、力を分散させることができます。
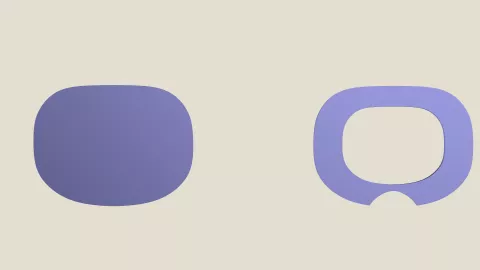
使用したバルクヘッドとバッフルの形状は図5に示されています。
シミュレーション結果
各バリエーションの結果は動画2〜4で示されています。液体ガソリンは黄色、ガス相は半透明黄色で可視化しています。
- タンクコンポーネントに作用する縦方向合計力
スロッシングによってタンクおよびそのコンポーネントに作用する総縦方向力を解析することは、各バリエーションの挙動を理解する上で重要です。図6に、3つのシミュレーションバリエーションにおけるタンクへの縦方向スロッシング力の時間変化を示します。正の値は走行方向 (x方向) に作用する力、負の値は逆方向の力を示します。
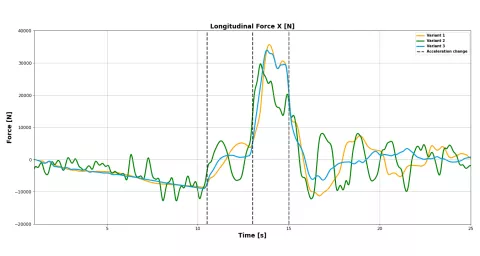
力の大きさは3つのバリエーションで概ね同じですが、Variant 2(バルクヘッド使用)の曲線は振動回数が多いことがわかります。すべてのバリエーションで、トラックの加速度プロファイルが大きく変化する10.5秒および13秒付近で力が増加しています。13秒~15秒の間にブレーキをかけると、Variant 2のピーク値は他のバリエーションより低くなります。
15秒以降、トラックは停止しているにもかかわらず、タンク内のガソリンはスロッシングを続け、力の振動が観察されます。振動の周波数はバルクヘッドを使用したVariant 2で最も高く、Variant 3(バッフル使用)は曲線が滑らかで、力の変動が最小となります(動画4参照)。
結論:バルクヘッドは総力のピーク値をある程度抑える一方、バッフルは力の振動を大幅に低減する効果があります。
- ホイール変位に及ぼすスロッシングの影響
もう一つ重要な観点は、スロッシングがサスペンションのばね荷重およびホイール変位に与える影響です。
その結果を 図7a (右前輪) と 図7b (右後輪) に示します。
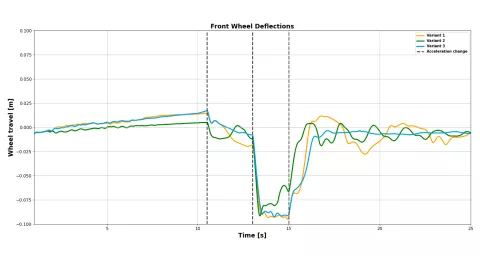
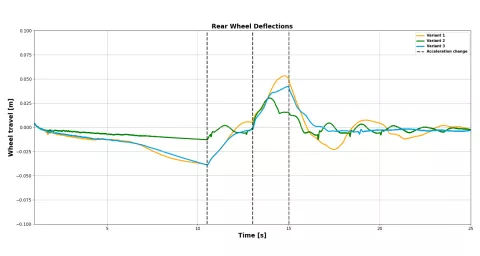
加速フェーズでは、バリアント2が最も小さなホイール変位を示し、バリアント1とバリアント3は類似した傾向となりました。これは、バリアント1では仕切り板 (バルクヘッド) により流体が3つの独立した区画に分けられ、燃料全体の重心が他の2つのバリアントほど後方に移動しないためです。その結果、重量分布がより一定に保たれ、ホイール変位が抑えられることにつながります。
15秒以降、トラックが停止した後も燃料のスロッシングは継続し、バリアント1とバリアント2ではホイール変位に振動が現れます。これは全体の縦方向スロッシング力において観察された現象と同じです。バリアント2 (バルクヘッド付き) は振動の周波数が高く、バリアント1では振動の振幅が大きくなります。これに対して、バリアント3 (バッフル付き) の変位曲線は非常に滑らかです。
このことから、タンク内部にバッフルを設ける設計がホイール変位の抑制においても有効であるといえます。
- 流体速度の可視化
スロッシングをバーチャルに解析する強みの1つは、ポストプロセスにおいて多様な分析が可能な点です。力、圧力、ホイール変位などの統計的解析だけでなく、流体の詳細な挙動、例えば 流体速度を可視化することができます。動画5・6・7では、各バリアントにおけるx方向の流体速度を表示しています。さらにPreonLabでは、パスライン機能により粒子の軌跡を可視化することが可能です。パスラインは個々の粒子が時間とともに移動する経路を示し、速度の大きさで色分けできます。ユーザーは追跡する粒子を、時間範囲や空間領域、あるいは特定のジオメトリ表面に基づいて指定できます。動画8では、バリアント3の2枚目のバッフル周辺における粒子のパスラインを、制動フェーズにおいてPathlines Sensorを用いて可視化しています。
PreonLab 6.2を用いることで、マルチフェーズのタンクスロッシングシミュレーションを実行し、加減速に伴う車両のばね変位や、スロッシング力がサスペンションへ与える影響をFCSMで評価できます。
PreonLabはメッシュフリー手法を採用しているため、追加の前処理を必要とせず、短時間でシミュレーションを実施可能です。ポストプロセス機能も直感的に扱え、流体挙動や車両サスペンションに関する幅広い統計データを容易に取得できます。
本記事では、3種類のタンク設計バリエーションに対してスロッシング現象を可視化し、タンクに作用する縦方向スロッシング力とトラックのホイール変位を解析しました。その結果、バッフルを備えたタンク設計が、タンク内の力の変動やトラック停止後のホイール変位の振動低減に最も有効であることが示されました。
Stay tuned
Simulation blogシリーズをぜひご覧ください。ご登録いただくと最新情報をお届けします。
Read More About This Topic
Simulation Blogを購読
最新情報を受け取れるよう、ぜひご登録ください。