
PreonLabが車両ソイリングシミュレーション(Soiling: 雨、雪、泥などの付着)に理想的なソフトウェアである5つの理由
Published on July 01, 2024 · 15 min read

PreonLabは、従来のCFDシミュレーションに必要な計算用メッシュの作成が不要な、粒子法の一種であるSmoothed-Particle-Hydrodynamics(SPH)法に基づいたソフトウェアです。ラグランジュ手法により、格子法でのシミュレーションに必要なメッシュの作成が不要です。その結果、シミュレーションの設定にかかる時間と労力を大幅に節約できます。さらに、PreonLabの革新的なPREONテクノロジーの中核は、計算の安定性を損なうことなく、大きなタイムステップ(CFL 1)、各タイムステップ毎の高速計算、計算に適した分解能それぞれを可能にする陰解法ソルバーです。このソルバー固有の優位性に加えて、PreonLabは、直感的なユーザーインターフェイス、豊富な使いやすい機能、および、さまざまな種類のハードウェアに対応するマルチプラットフォームサポートを兼ね備えています。
PreonLabは、さまざまな種類のソイリングシミュレーションに対応しています。ソフトウェアには、水や油などの流体に加えてさまざまなタイプの雪質の物性データが内蔵されおり、それらを活用してすぐにソイリングシミュレーションを開始することができます。ビデオ1に、水と雪を使用したシミュレーションの例を示します。
ビデオ1:PreonLabによる車両ソイリングシミュレーション
PreonLabでは、液体―固体間、および、液体―液体間に働く凝集力モデルに加えて、液滴の挙動の再現性を高める横方向凝集力のモデルを実装しています。ビデオ2に液滴挙動に対する横方向凝集力の影響を、ビデオ3に横方向凝集力を考慮したフロントガラスの液滴挙動のシミュレーション例を示します。
ビデオ2:横方向凝集力が液滴の挙動に与える影響
ビデオ3:横方向凝集力を考慮したフロントガラスに付着する液滴の挙動のシミュレーション例
さらに、さまざまなニュートン流体から非ニュートン流体まで、幅広い物性の流体解析が可能です。ユーザーが自由に定義した物性は、新規物性として保存することができ、他のシミュレーションに転用することができます。

FIFTY2の理念は、効率的で高性能なシミュレーションソフトウェアを提供するということであり、PreonLabの開発の中核を成しています。これには、シミュレーションのためのメモリー使用量を最小限に抑えながら、計算速度を最大化するためのソフトウェアの開発が含まれています。
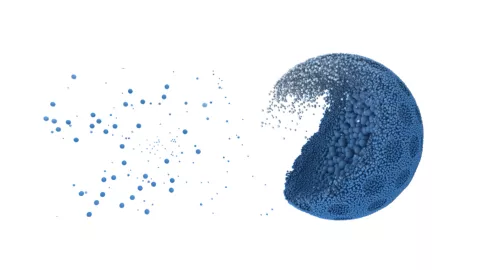
連続粒子サイズ機能(Continuous Particle Size: CPS)は、流体力学シミュレーションにおける離散点である粒子を、微細化したり粗大化したりすることができる独自のアルゴリズムです。通常、車両ソイリングシミュレーションにおいて、高い計算精度が求められる領域(車両のホイールハウス領域、車両表面近傍の領域、水漏れの可能性があるシール材周辺領域など)では、分解能を高く、すなわち、粒子を細かくする必要があります。一方、これらの領域以外では、分解能を低く、すなわち、粒子を荒くして計算時間やメモリー使用量を最小化することが望ましいです。CPSを活用することによって、粒子の最大径と最小径との比を大きく保ちながら、各シミュレーションステップにおいて効率的に粒子を微細化したり粗大化することができます。その結果、計算精度と計算時間・メモリー使用量とのトレードオフ関係に悩むことなく、シミュレーションの性能を最大限を引き出すことが可能です。
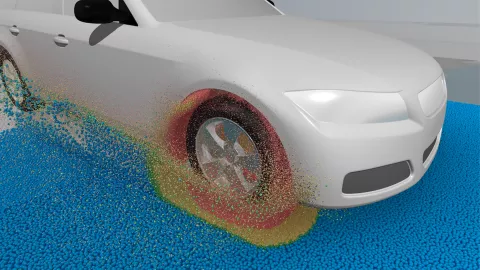
さらに、粒子の微細化領域の設定は、複雑な形状の周囲のみに適用する場合であっても、簡単に行うことができます。表面近傍微細化機能によって、選択した形状の表面近傍のみ粒子を微細化することが可能です。図3に、車両の右前輪近傍のみに適用した粒子微細化の例を示します。
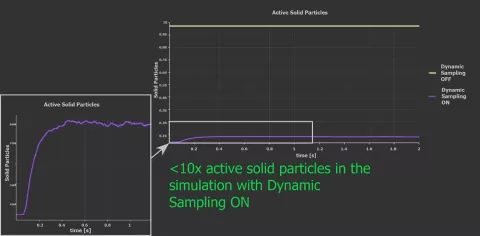
もう1つのPreonLab独自のアルゴリズムは、各シミュレーションステップにおいて、固体の粒子生成を流体計算に必要な領域のみ行うダイナミックサンプリング機能で、メモリー使用量を低減することができます。これは、流体粒子の近傍の固体形状表面のみ粒子化するもので、その結果、固体の粒子数、すなわち、メモリー使用量を低く保つことができます。特に、車両のソイリングシミュレーションにおいては、すべての車両形状を固体粒子化しないため、計算時間やメモリー使用量を抑えることができます。
図4に、図2のタイヤのスプラッシュシミュレーションの例において、ダイナミックサンプリング機能が固体粒子数に与える影響を示します。ダイナミックサンプリング機能を用いると、スプラッシングする水の挙動に伴い固体粒子数が増加し、最大8350万個に達します。一方、それを用いない場合、流体粒子が存在しない領域にある車両表面まで固体粒子を生成するために、その数はシミュレーション開始直後から10億個になります。ダイナックサンプリングを用いないと、流体力学解析に関係ない領域でも固体粒子を生成して計算するため、その総数が計算初期から多く計算コストの増大を招きます。
上記の通り、車両ソイリングシミュレーションでは、計算コストとメモリー使用量が高くなる傾向があります。計算にかかる時間が長くなるため、解析プロジェクトそのものに要する時間も長くなり、そのマネジメントが難しくなります。
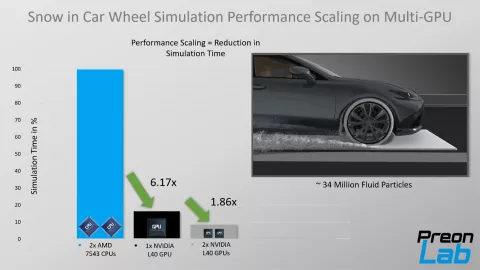
通常、GPU計算は、CPUと比較して、単位ワット数当たりのパフォーマンスが非常に高いため、計算時間の点においてより優れています。そのため、車両ソイリングシミュレーションでも計算時間の短縮が期待されますが、GPUを使用する際の問題はメモリー使用量の制限です。そこで、PreonLab 6.1では、複数のGPUを使用した計算に対応しています。これにより、メモリー使用量が大きな大規模シミュレーションが可能となるだけでなく、複数のGPUを利用したさらなる計算速度向上も可能になります。
マルチGPUによるパフォーマンスの向上とメモリー使用量の増大は、特に車両ソイリングシミュレーションに対して有益です。図5に、車両のホイールハウス内の着雪シミュレーションを例に、PreonLab 6.1のマルチGPU計算のベンチマーク試験結果を示します。
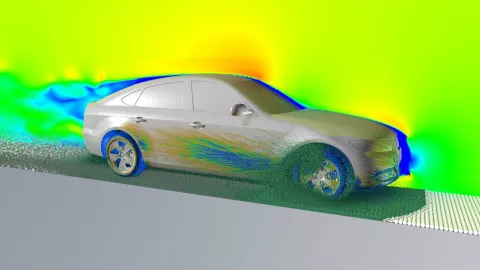
気流場の可視化
上述した通り、車両の空力によって、ソイリングの状態は大きく変わります。特に、Aピラー後方のサイドウィンドウにおけるソイリング状態や、タイヤのスプラッシングによるリアのソイリング状態を模擬するために、それらのシミュレーションで非定常の気流場を考慮することが欠かせません。
PreonLabは、CSV形式、または、EnSight Gold形式による非定常・定常両方の気流場のインポートに対応しています。ビデオ4に示す通り、インポートした気流場は、その設定を確かめるため、PreonLab上で可視化することができます。
ビデオ4:PreonLab上で可視化した非定常気流場
ウェッティングセンサー
ウェッティングセンサーにより、任意の固体部位における濡れの有無や濡れ時間を解析することができます。センサーは、数回クリックするだけで、シミュレーション内の任意の固体形状に簡単に設定できます。それにより、ある時間において流体が接触している固体形状部位を可視化することができ、また、どのくらいの時間接触していたかを解析することができます。この機能は、車両ソイリングシミュレーションにおいて、車両表面のソイリングの状態を簡潔に解析することができ、汚染やリークが発生しやすい箇所を一目で特定することができるため、非常に便利です。図6に、車両ボディ側面に設定したウェッティングセンサーを用いて、タイヤによるスプラッシングで発生した汚れの状態を可視化した様子を示します。
パスラインセンサー
パスラインセンサーにより、流体運動を表す粒子の軌跡を可視化し、各時刻における速度を解析することができます。これは、車両ソイリングシミュレーションにおいて、水滴の付着経路や水の侵入経路を解析するのに非常に有効です。その解析対象となる粒子を選択するためには、PreonLab上で時間範囲と空間領域を指定するだけです。領域の指定に関しては、特定の固体形状の表面近接を定義することも可能です。ビデオ5に示すように、パスラインは矢印で可視化され、流れの方向を視覚的に確認することができます。
ビデオ5:車両着雪シミュレーションにおけるパスラインセンサーによって可視化された流れの軌跡
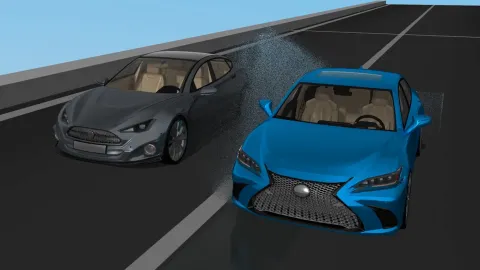
写真のように現実感ある画像の出力機能
最後に、PreonLabには、一般的に使用される流体・固体の各種材料物性パラメーターが標準搭載されており、PreonRendererと呼ばれるレイトレーシング法による画像出力機能が備わっています。数回クリックするだけで、写真のように現実感ある画像を出力することができ、車両デザインやソイリング状態を高度に解析し、直感的な知見を得ることができます。
車両ソイリングは、自動運転のためのセンサーやカメラの機能や運転中のさまざまな安全性に、大きな影響を与えます。ソイリング状態は、さまざまな要因が絡み合って発生した結果であり、各プロトタイプを用いた実試験でその要因を解析することは現実的に不可能です。幅広い流体解析が可能で使い勝手の良い革新的な機能を備えたPreonLabにより、車両設計の初期段階にて、仮想空間で実試験を補完しながら多くの知見を得ることが可能です。さらに、メッシュ作成が不要、マルチGPUによる高速計算が可能、さまざまな計算後処理ツールを兼ね備えたPreonLabにより、車両ソイリングシミュレーション自体の解析プロジェクトの所要時間とコストを大幅に削減できます。
こちらをクリックして、車両ソイリングに関するウェビナーをご覧ください。
最新の情報をお見逃しなく
シミュレーションのブログシリーズをご覧ください。今すぐ登録して最新情報を受け取りましょう。
テーマについてさらに詳しく知る
Electric mobility and autonomous driving are changing vehicle design requirements. Water management, vehicle and sensor soiling and aeroacoustics is becoming increasingly important. During our event we will discuss how innovative simulation technologies are accelerating development and optimizing vehicle design.

Vehicle soiling phenomena can be a major safety hazard due to obstructed driver’s visibility of the road or abnormal operation of advanced driver assistance systems (ADAS).
車両やセンサーの汚れは、車両設計においてますます重要な要素となっています。外観だけでなく、安全性の向上やコスト削減に直結する最新の課題を、専門家が徹底解説します。
最新のシミュレーションのブログ記事をお見逃しなく
シミュレーションのブログシリーズをご覧ください。今すぐ登録して最新情報を受け取りましょう。