
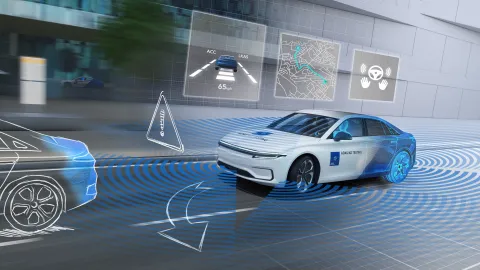
순수 시뮬레이션을 넘어, 사이버-물리 기반의 시험 방식은 매우 중요한 역할을 수행합니다. AVL DRIVINGCUBE는 시뮬레이션과 실제 주행 가능한 차량을 샤시 다이나모미터 또는 파워트레인 시험기에서 결합해 구현한 솔루션입니다. 다수의 연구 및 위탁 프로젝트를 통해 축적된 경험이 DRIVINGCUBE 설계에 정교하게 반영되었습니다. 이 시스템은 시나리오 기반의 완전 자동화 시험을 통해 ADAS 및 AD 시스템의 검증 및 승인 프로세스를 가속화하며, 시험 커버리지를 확대하고 테스트 비용을 절감하는 데 기여합니다. 포괄적인 센서 자극 기능과 전방위 조향 기능을 갖춘 DRIVINGCUBE는 실제 주행 시험장의 환경을 시험 장비 위에서 재현할 수 있게 합니다.

AVL은 Rohde & Schwarz 및 Stähle 와 함께 새로운 형태의 차량 수준 시험 환경을 구현했습니다. 이제 시험실 내에서 실제 조향 기능을 수행하고, 레이더 기반 및 GNSS 기반의 시험과 검증을 안전하고 반복 가능한 조건 하에서 수행할 수 있습니다. 실제 차량에 장착된 센서들을 가상으로 시뮬레이션하므로, 차량을 물리적으로 개조할 필요가 없습니다. AVL DRIVINGCUBE는 ADAS 및 AD 시스템의 검증 및 승인 프로세스를 획기적으로 단축하는 새로운 시험 방식을 제시합니다. 또한 AVL의 첨단 시험 서비스, 독점 파트너 네트워크, 그리고 국내외 인증기관과의 긴밀한 협업을 통해 고객은 다양한 혜택을 누릴 수 있습니다.
| 항목 | 설명 |
| 레이더 타겟 시뮬레이터 | 주파수 76-81GHz,대역폭: 4GHz, 최대 8개 타깃 지원,거리: 2-300m |
| 동적 회전력 에뮬레이터 | 작동 속도: 250mm/s, 스티어링 랙에 가해지는 정격 힘: 4kN, 과부하 한계: 5kN, 작동 거리: 180mm |
| 카메라 시뮬레이터 | 차량의 카메라 시스템에 따라 모니터 또는 스크린 투사 방식 등 다양한 솔루션 제공 |
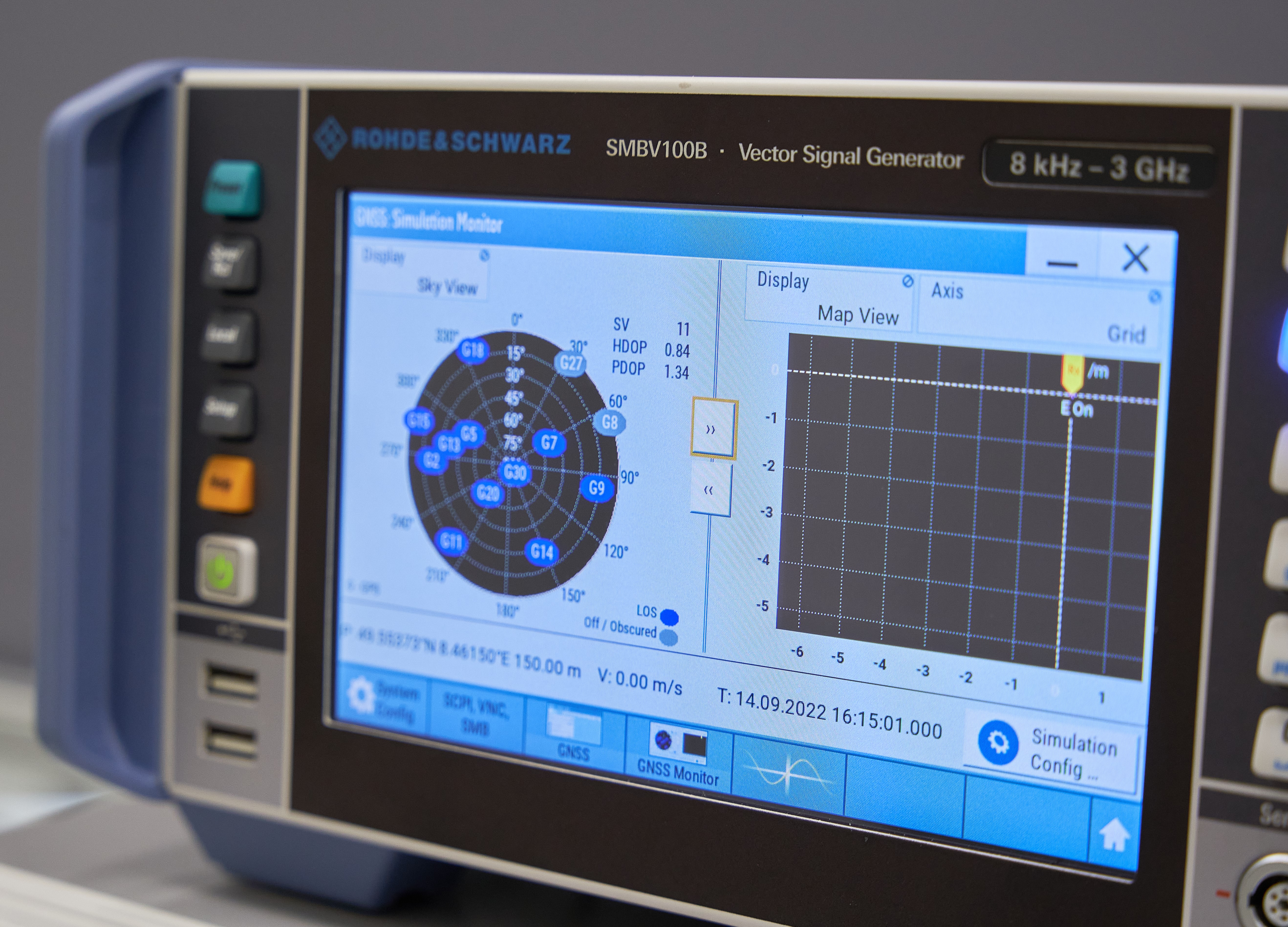
| GNSS 시뮬레이터 | 실시간 위성 모델 기반, OTA(Over-the-Air) 또는 케이블 방식 시뮬레이션, GPS, Gaileo, Glonass, Beidu 지원 |
ADAS 및 AD 시스템에 대한
시험 커버리지 확대와 시험 효율 향상
재현성이 높은 조건에서
차량 수준과 동일하게 테스트 실행
다양한 시나리오와 차량 구성 변형에 대해
효율적인 반복 시험 수행
위험 상황에서도 안전한 시험 환경 확보
주행 중 발생할 수 있는 위험 시나리오에 대응 가능
기존 섀시 다이나모미터 및 파워트레인 테스트베드에
손쉬운 업그레이드 적용
New: AVL Integration Core™
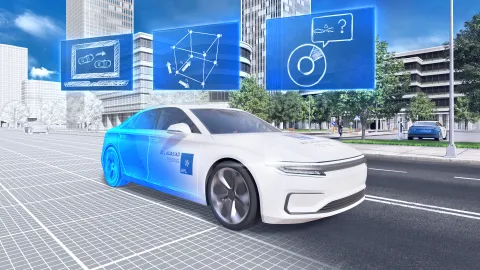
This modular testing platform integrates powerful hardware with an open, flexible software suite to enable comprehensive validation of ADAS/AD systems. It supports seamless testing across Software-in-the-Loop (SiL), Hardware-in-the-Loop (HiL), and Vehicle-in-the-Loop (ViL) environments, making it ideal for everything from early-stage simulation to full system integration and scenario-based testing.

조향력 에뮬레이터
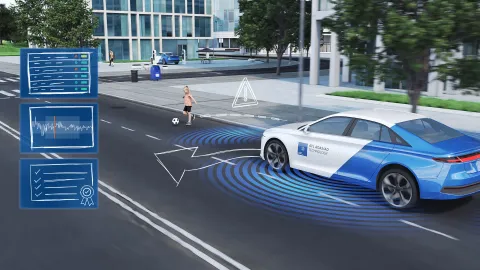
이 모듈은 차량에 추가 장착되는 장치로, 가상의 도로로부터 정확한 조향력 피드백을 제공하며, 전방위 조향 동작을 가능하게 합니다. 차량에 설치 시, 능동형 차선 유지 시스템(LKAS)과 같이 실제 조향 동작이 요구되는 ADAS/AD 기능의 검증에 사용됩니다.

레이더 시뮬레이터
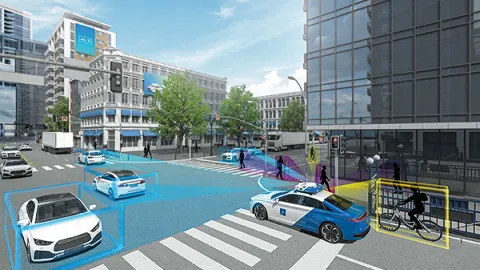
레이더 시뮬레이터는 실제 차량 주행 없이도 자동차 레이더 센서를 위한 독립적이고 현실적인 가상 타겟을 생성합니다. 기계적 이동 부품 없이, 공간을 최소화하며 작동하며, 다양한 타입의 레이더 센서를 OTA(Over-the-Air) 방식으로 자극할 수 있습니다.

카메라 시뮬레이터
카메라 시뮬레이터는 ADAS/AD 기능 테스트 검증에 필요한 자동차 카메라를 쉽게 무선으로 자극할 수 있게 해줍니다. 차량 내 카메라 시스템에 물리적으로 접근하지 않고도 시험이 가능합니다.

GNSS 시뮬레이터
GNSS 시뮬레이터는 차량이 시험 장비 위에 위치한 상태에서도 지구상의 모든 위치를 기반으로 위성 신호를 동적으로 시뮬레이션할 수 있습니다. GPS, GLONASS, BEIDOU, GALEO와 같은 글로벌 위성 항법 시스템 표준을 지원합니다.
베를린 공과대학교(TU Berlin)에 구축된 AVL DRIVINGCUBE™는 여러 연구 및 산업 프로젝트를 통해 전동화 차량과 자율주행 차량 분석을 위한 고효율 테스트 환경으로서의 성능을 이미 입증받았습니다.
– Steffen Müller 교수. 베를린 공과대학교 자동차공학부 학과장 / 명예 공학 박사
SCENIUS는 시나리오 기반 ADAS 및 AD 안전성 테스트 및 검증을 위한 종합적인 솔루션입니다.
ADAS/AD 기능 검증을 위한 고정밀 동적 환경 계측 솔루션
현재는 물론, 미래까지 대비하는 NCAP 및 인증 시험의 효율성을 극대화하세요.
AVL ADAS/AD Big Data and Analytics Platform™을 통해 실제 주행 데이터의 가치를 최대한 활용해 보세요.
ADAS/AD 기능의 검증 효율화를 통한 신속한 차량 출시 전략

- EN,
A new way to speed up the validation and approval process of ADAS/AD systems.

- EN,
AVL and Rohde&Schwarz have intensified their collaboration with the integration of a Rohde&Schwarz radar test system into the AVL DRIVINGCUBE™.

The integration of ADAS/AD systems into vehicles moves forward.But what needs to be considered when developing and validating these systems? You will receive answers to these questions and gain insights into application examples in this webinar!

Ready to combine the best of two worlds?The demand for ADAS/AD testing and validation in simulation and real world is increasing rapidly due to the growing number of ADAS/AD functions and vehicle variants.