
電動ウォーターポンプのNVH解析
Published on December 02, 2025 · 2 min read
世界的なエネルギー構造の転換と「デュアルカーボン」戦略の推進に伴い、新エネルギー車(EVおよびプラグインハイブリッド車を含む)の市場普及率は年々増加しています。新エネルギー車の熱マネジメントシステムの中核部品である電動ウォーターポンプは、バッテリー、モーター、および電子制御システムの冷却を担っています。その信頼性、効率、および NVH(騒音・振動・ハーシュネス)性能 は、車両の安全性、エネルギー消費、そして乗り心地に直接影響を与えます。
従来の内燃機関車とは異なり、新エネルギー車に搭載される電動ウォーターポンプは、一般的により高回転で作動し、頻繁な起動・停止条件に適応する必要があります。
また、静粛性の高い電動車の車内環境では、その振動や騒音がユーザーにより認識されやすくなります。このため、電動ウォーターポンプのNVH性能は、高級車モデルの市場競争力に影響を与える重要な要素となっています。
近年、車両のNVH性能に対する消費者の要求はますます厳しくなっており、ISOなどの国際標準や各国の規制においても、車室内騒音に対する基準が段階的に強化されています。このような背景のもと、電動ウォーターポンプのNVH問題は、単なる技術的課題にとどまらず、自動車メーカーが製品の差別化を図り、ユーザーの高付加価値ニーズに応えるための重要な突破口となっています。
しかし、電動ウォーターポンプのNVH最適化には、マルチフィジックス連成による複雑さという課題があります。すなわち、モーターの電磁励振、インペラの流体起因振動、軸受の振動、さらには構造共振が相互に影響し合いながら発生します。そのため、正確な原因の特定と効果的な抑制を実現するには、電磁・機械・流体の連成シミュレーションなど、分野横断的な協調解析が必要となります。

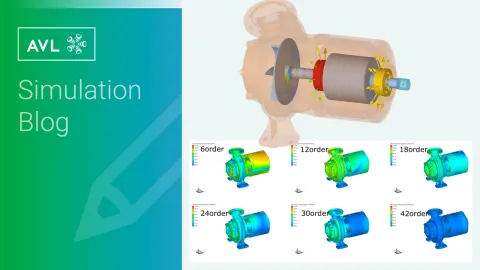
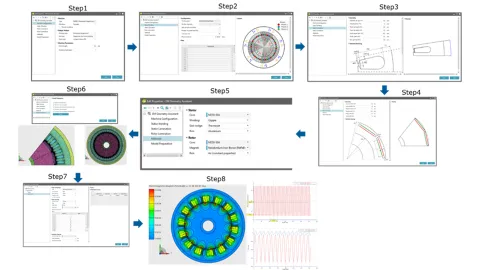
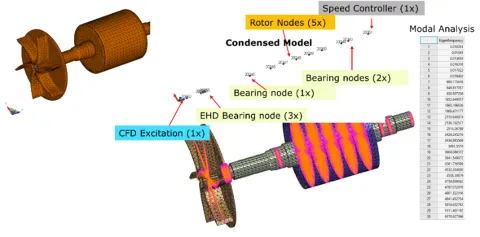
図1は、電動ウォーターポンプの詳細モデルを示しています。本モデルの詳細なNVH評価計算は、電磁界シミュレーション、CFD解析、動力学シミュレーション、および音響シミュレーションを組み合わせて実施されています。具体的な解析プロセスは以下のとおりです。
Step 1: AVL E-Motor Tool™
電磁界解析 → ステーター力およびロータートルクの計算
Step 2: CFD
3次元数値流体力学(CFD)解析 → 構造部品に作用する流動特性および圧力分布の計算
Step 3: MBD(Multi-Body Dynamics)
マルチボディダイナミクスモデル → ステップ1およびステップ2の励振源を統合し、インペラおよびモーターローターの動力学(すべり軸受の特性を含む)を考慮
Step 4: EAC(EXCITE Acoustics)
空力騒音の計算 → EXCITE Acousticsによる音響シミュレーション

AVLソフトウェアプラットフォームにおける専門的な電磁界解析ソフトウェアであるAVL E-Motor Tool™(EMT)を用いることで、モーターに関連する電磁界解析を迅速かつ容易に実施できます。これにより、後続のモーター性能評価、3次元熱マネジメント解析、およびモーターダイナミクス解析のための正確な負荷条件を提供し、AVLプラットフォーム内における電動化解析データのシームレスな連携を可能にします。
EMTのGeometry Assistantモジュールを使用することで、ユーザーは幾何形状の入力またはCADデータのインポートにより、モーターの断面モデルを定義することができます。また、材料特性の設定やメッシングも同時に実施可能です。さらに、Model Assistantモジュールと組み合わせることで、さまざまな回転速度およびトルク条件下におけるモーターの電磁界解析を実行できます。これら一連のプロセスは、簡便かつ効率的に行うことができます。
本モデルのモーターは、7極対、42ステータ歯を有し、PMSM(永久磁石同期モーター)の分布単層巻線構造となっています。モーターの電磁界解析結果を図3に示します。
専門的なCFDシミュレーションソフトウェアであるAVL FIRE™ M には、Embedded Body(埋め込み境界)イマースドバウンダリ法が搭載されており、一般的な流れ場を高速かつ高精度にシミュレーションすることができます。本手法では、移動部品に対する個別のメッシングは不要です。代わりに、解析領域全体に対して背景メッシュを作成し、その中に計算境界を埋め込みます。数値計算により流体と固体の界面を識別するため、複雑な境界形状や移動境界を伴う解析に適しています。
埋め込み物体周りの流れを正確に考慮するため、Embedded Body法ではナビエ・ストークス方程式の離散化機能を拡張し、流体―固体界面における勾配計算および境界条件の処理に重点を置いています。本ケースでは、この手法に基づき、ウォーターポンプロータのメッシングを行うことなく、流体領域と固体領域の双方を考慮しています。これにより、ロータおよびハウジング壁面に作用する荷重を迅速に算出することが可能となります。
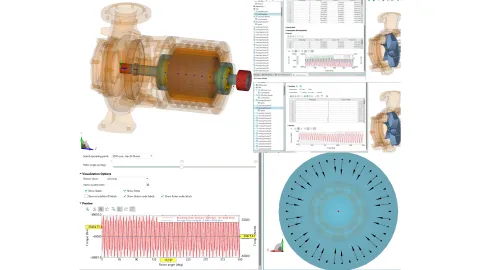
モデルの境界条件は以下のとおりです。ウォーターポンプ入口の流量は4.75 m³/h、水温は25℃、ポンプ回転数は3500 rpm、出口圧力は10 barです。これらの境界条件の設定を図4に示します。

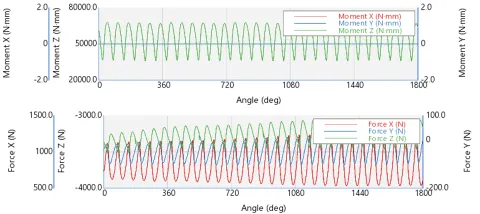
ウォーターポンプのCFD解析により得られたブレードの圧力データに基づき、下図に示す計算手法と組み合わせて、ソフトウェア内のカスタム数式(Formula)を用いて、ブレードロータに作用するトルクおよび力を等価的に換算します。

換算後のロータトルクおよび力を、下図に示します。
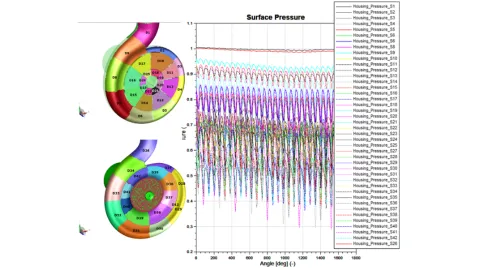
ハウジング表面には異なる領域が設定され、各位置での瞬時圧力をマッピングして出力します。具体的な領域分割および各領域での圧力振幅は以下のとおりです。
有限要素モデルの設定
電動ウォーターポンプの動力学モデルは、AVL EXCITE™ Mを用いて構築します。モデルの主な構成要素には、ウォーターポンプのハウジングおよびローターが含まれます。ローターのメッシュおよび簡略化モデルを下図に示します。簡略化モデルの主なノードには、ウォーターポンプブレード荷重の作用点、前方すべり軸受のエラストハイドロダイナミクス(EHD)接続点、軸受接続点、モーター中心点が含まれます。簡略化した.exbファイルのモードは、解析要件を満たしています。
ウォーターポンプハウジングは線形化モデルとして扱います。簡略化モデルの主要ノードには、ウォーターポンプ圧力荷重作用面、前方すべり軸受のEHD接続点、軸受接続点、モーターステーター接続点が含まれます。簡略化された.exbファイルのモードも解析要件を満たしています。後続の解析で圧力境界を適用するため、モデル縮約時にサブストラクチャ荷重ステップを追加しています。これを下図に示しています。


接続定義
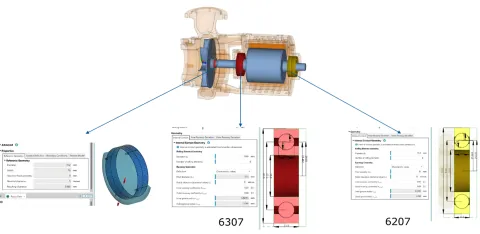
本動力学モデルにおける主要な接続点には、前方すべり軸受のEHD接続およびモーター両端のローラーベアリング接続が含まれます。EXCITE Mの高度なすべり軸受解析モジュールを活用することで、すべり軸受の支持を正確に考慮できるだけでなく、すべり軸受の潜在的な摩耗リスクも評価することが可能です。
荷重適用
モデルにおける荷重境界には、ウォーターポンプローターの径方向力・軸方向力およびトルク、ハウジングのウォーターポンプ壁面圧力、モーターの電磁励振が含まれます。具体的な荷重適用は以下のとおりです。
ダイナミクス解析結果
回転速度1000 rpm~3500 rpmに対応する解析を実施しました。結果は、全速度域で安定性が確認されました。軸受にかかる力も比較的妥当であり、運転中に軸受打音は発生しませんでした。
前方軸受の最大粗接触圧は約75 MPaに達します。軸受の粗接触圧分布を見ると、軸受前端部で部分的な摩耗のリスクがあることが示されています。

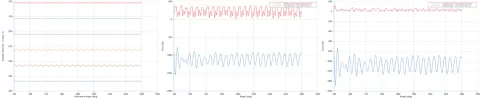
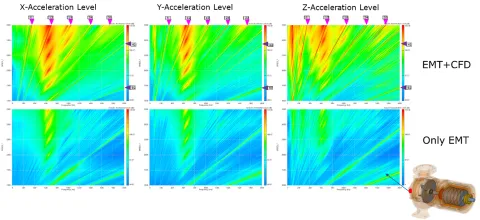
下図は、モーターハウジングおよびウォーターポンプハウジング表面の注目ノードにおけるXYZ三方向の振動加速度結果を示しています。前方のウォーターポンプローターが6枚のブレードを持つため、運転中の液体圧力には6次の高調波成分が生じます。その結果、ハウジング表面では6次、12次、18次、24次、30次の振動振幅が大きくなります。同時に、モーターの電磁励振の適用により、モーターでは42次および84次の振動高調波振幅も大きくなることが確認されます。

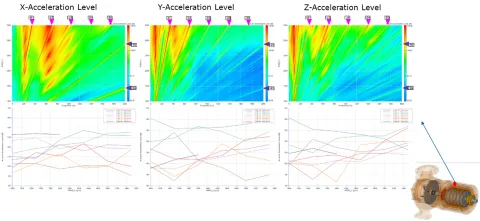
電動ウォーターポンプハウジング表面の振動結果と照合すると、600〜700 Hzの間に顕著な共振帯が存在することがわかります。ウォーターポンプシステムのモーダル解析に基づくと、636 Hzおよび648 Hz付近に明確なハウジングシステムモードが確認されます。これらの周波数帯に対して、後続の構造改善でターゲットを絞った最適化を行うことが可能です。
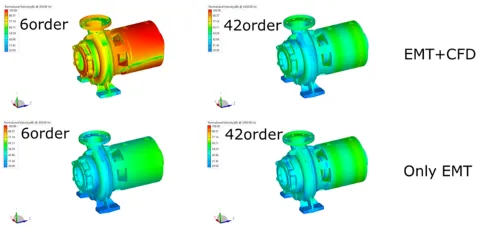
下図は、回転数3500 rpm時の電動ウォーターポンプにおける各主要次の振動コンターを示しています。全体として、ウォーターポンプハウジングの振動振幅はモーターハウジングよりも大きくなっています。

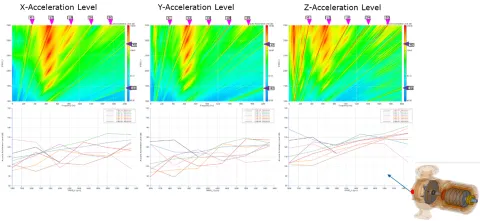
下図は、ウォーターポンプ励振を除去した後の結果の比較を示しています。視覚的に見ると、ウォーターポンプ励振を除去した場合、ウォーターポンプハウジング表面の振動振幅は、全ての励振を考慮した場合と比べて著しく小さくなっています。
ハウジング表面の振動コンターを見ると、ウォーターポンプ励振の主要次における振幅に顕著な変化が見られます。ウォーターポンプ荷重励振が作用するとハウジングの振動は大きく増加する一方で、モーターの高周波主要次におけるハウジング表面の振動変化は比較的小さいことがわかります。

最新の情報をお見逃しなく
シミュレーションのブログシリーズをご覧ください。今すぐ登録して最新情報を受け取りましょう。
テーマについてさらに詳しく知る

NVH calculations provide information about resonant speeds and frequencies, but the cause of resonances themselves cannot be easily determined. In order to find root causes of faults or problems, Root Cause Analysis should be carried out.
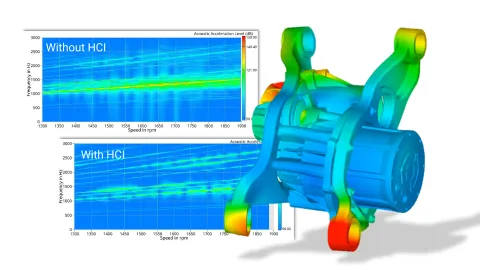
電気自動車の普及が進む中、NVH(騒音・振動・ハーシュネス)は重要な品質指標の1つとなっています。
有望な解決策である高調波電流注入 (HCI) は、試作機製作前の段階からNVH課題に対応できるよう、仮想環境上でシミュレーションが可能です。
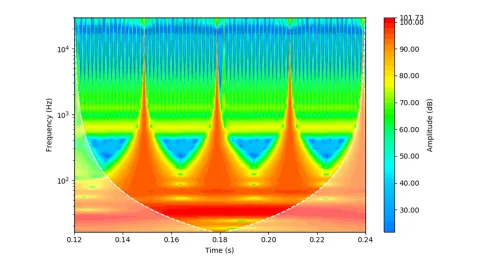
この記事は、信号処理に由来する時間‐周波数解析(Time-Frequency Analysis)という手法について説明しています。
簡単に言うと、これは時間の経過に伴って得られる信号(またはシミュレーション結果)から、その周波数成分を求める方法です。
The fourth part of this online event series focuses on AVL's simulation solution for electric drive development. Learn about the opportunities that virtualizing can provide. Especially when it comes to using a consistent set of simulation tools for a streamlined workflow.
最新のシミュレーションのブログ記事をお見逃しなく
シミュレーションのブログシリーズをご覧ください。今すぐ登録して最新情報を受け取りましょう。