AVL 최신 소프트웨어 릴리스 2025 R2
Published on November 03, 2025 · 5 min read









Vehicle System
모델 플로 다이어그램(Model Flow Diagram) – 모델 평가의 새로운 단계
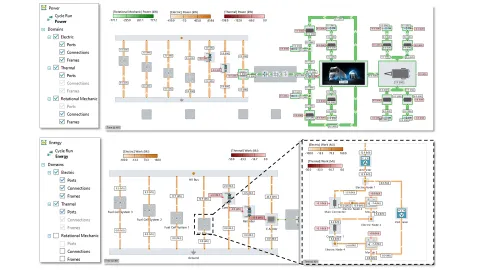
다물리(multiphysical) 시스템 시뮬레이션은 가스, 액체, 전기 및 기타 도메인의 구성요소로 이루어진 플랜트 내에서의 에너지 전달 및 변환을 다룹니다. CRUISE M은 이러한 시스템을 분석하기 위해 생키 다이어그램(Sankey diagram)을 제공해 왔습니다.
이번 버전에서는 파워 및 에너지 분포를 평가하기 위한 독자적인 도구인 모델 플로 다이어그램(Model Flow Diagram, MFD)이 새롭게 도입되었습니다. 추상적인 시각화에 기반한 기존 생키 다이어그램과 달리, MFD는 원래 블록 모델 위에 오버레이 형태로 파워 및 에너지 플럭스를 시각화합니다. 플럭스는 컴포넌트 간에 교환되는 부분과, 컴포넌트를 통해 손실로 빠져나가는 부분으로 구분됩니다.
MFD는 서로 다른 시뮬레이션 시간 스냅샷의 데이터를 통합해, 과도(transient) 애니메이션으로 표현합니다.
프로파일 컴포지션(Profile Composition) – 주행거리 및 연료 소비 분석
전동화 모빌리티로의 전환은, 단순한 인증 사이클에서 벗어나 주행거리 및 연료 소비를 보다 포괄적으로 평가할 수 있는 주행 사이클로의 전환을 요구합니다. 기존에 CRUISE M은 Random Cycle Generator(20,000개 이상의 속도 프로파일 스니펫 데이터베이스에서 무작위로 조합)와 Route Generator (HERE.com에서 실제 속도 프로파일을 가져와 사용)을 제공해 왔습니다. 여기에 더해, 이제는 CRUISE M에 내장된 인증 사이클 데이터베이스를 활용해 주행 프로파일을 구성할 수 있게 되었습니다. 라이브러리에서 새로 추가된 Profile Composition 컴포넌트를 불러와 간단한 설정만 하면 됩니다. 이 컴포넌트는 약 50개의 서로 다른 인증 사이클 중에서 선택할 수 있으며, 사용자의 목적에 맞게 조합할 수 있습니다. 원하는 수만큼 프로파일을 정의하고, 이들 프로파일을 임의의 시퀀스로 조합해 하나의 주행 구성으로 만들 수 있습니다.

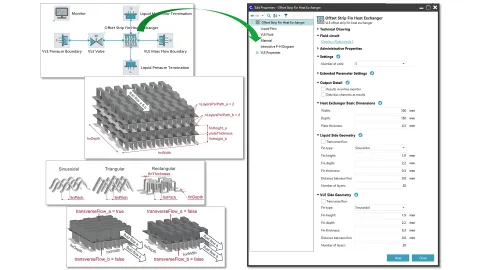
오프셋 스트립 핀 열교환기 – 강화된 열전달 성능
오프셋 스트립(offset strip)을 사용하는 열교환기는 공조(에어컨) 회로와 액체 유동 회로 간 열전달 성능을 향상시키는 하나의 옵션입니다. 이번 CRUISE M 버전에서는 이러한 타입의 열교환기를 지원하는 새로운 컴포넌트가 도입되었습니다. 오프셋 스트립 핀 형상을 위한 새로운 열전달 및 압력강하 모델이 추가되어, 기존 상관식 리스트를 확장합니다. 해당 컴포넌트가 포함된 설치 예제를 통해, 전통적인 판형 열교환기와 비교했을 때의 장점과 사용 방법을 손쉽게 익힐 수 있습니다.
Battery System
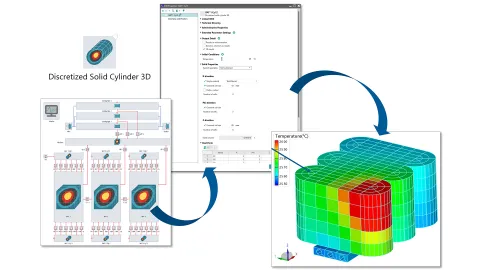
이산화 실린더형 3D(Discretized Solid Cylinder 3D) – 직육면체를 넘어선 열 모델링
3D 고체 구조 내 열전달을 모델링할 때, 직육면체(cuboid) 요소의 조합으로 모델을 구성하는 접근법이 일반적입니다. CRUISE M의 Discretized Solid 3D(DS-3D) 컴포넌트는 이를 지원하며, 3D 뷰어를 통해 프리뷰와 열 연결(thermal connection)을 인터랙티브하게 설정할 수 있습니다. 이번 버전에서는 새로운 Discretized Solid Cylinder 3D(DSC-3D) 컴포넌트가 도입되었습니다. 사용자는 반경 방향으로 서로 다른 재료를 정의하고, 중공(inner hollow) 반지름을 설정할 수 있으며, 완전 원통 / 반원통 / 1/4 원통 중 선택할 수 있습니다. 히트 포트(heat port)와 측정 포인트를 통해 관심 지점에 열원을 적용하고 온도를 모니터링할 수 있습니다. DS-3D와 DSC-3D 컴포넌트는 젤리 롤(jelly roll) 내부 및 프리즘 영역과 두 개의 반원통 영역에 걸친 온도 분포와 형상을 모델링하는 데 사용됩니다.
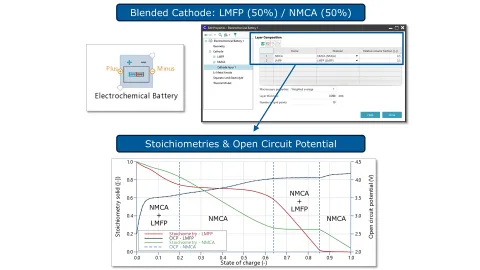
전기화학 배터리 – 이종 전극 블렌드(Heterogeneous Electrode Blends)
.리튬이온 배터리의 고급 설계에서는 개별 전극 재료의 장점을 결합합니다. 예를 들어, LMFP는 LFP와 LMP의 블렌드로, 전자는 우수한 열적 안정성을, 후자는 높은 에너지 밀도를 제공합니다. 고전적인 전기화학 P2D 모델은 전극을 균질화(homogenized)하여 접근하기 때문에, 기여 재료의 선형 중첩으로 설명할 수 없는 블렌드 전극을 제대로 모델링하지 못합니다. 이러한 이종 전극 설계를 보다 정교하게 다루기 위해, 이번 CRUISE M 버전에서는 확장·리팩터링된 Electrochemical Battery(ECB) 컴포넌트를 도입했습니다. 새 ECB는 양극(cathode), 음극(anode), 분리막(separator), 전해질(electrolyte)에 대해 재료 기반 입력을 제공합니다. 서로 다른 전극 재료를 설정하고, 이를 전극 전체 또는 여러 레이어 중 일부 레이어에만 적용되는 블렌드 형태로 조합할 수 있습니다. 각 재료는 삽입/탈삽(intercalation)과 열화(degradation)를 위한 개별 설정 및 입력을 가집니다.
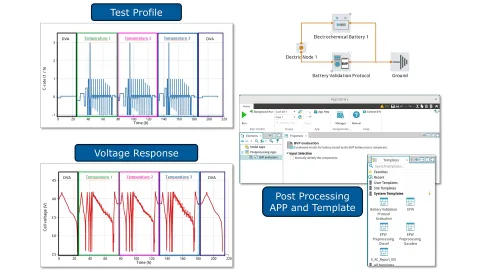
배터리 밸리데이션 프로토콜 – 테스트 프로파일부터 리포트까지
배터리 셀의 거동은 다양한 방법으로 평가할 수 있습니다. 그러나 서로 다른 부하, 부하 동특성, 온도 조건 등 다양한 테스트 시나리오를 다루다 보면, 전체적인 흐름을 놓치거나 테스트 간 비교 가능성이 떨어지기 쉽습니다. 이번 CRUISE M 버전에서는 가상 배터리 시험을 위한 구조화된 접근법인 배터리 밸리데이션 프로토콜(Battery Validation Protocol, BVP) 컴포넌트를 도입했습니다. 이 컴포넌트는 SOH 확인, C-rate 테스트, 펄스, 동적 사이클 프로파일 등을 포함한 시간 기반 부하 프로파일을 제공하며, 여러 운전 온도 조건을 지원합니다. 프로토콜은 개별 테스트 세그먼트를 효율적으로 구성해 테스트 시간을 최소화하며, 다양한 셀 크기와 화학 조성에 맞게 조정 가능합니다. 전용 BVP Evaluation App은 약 200시간 분량의 시뮬레이션 결과를 개별 세그먼트로 응축하여, 시간 및 SOC 함수로 데이터를 표현하고, 사용자 정의 분석 또는 사전 정의된 결과 페이지 형태로 바로 활용할 수 있도록 지원합니다.
Fuel Cell and Electrolyzer System
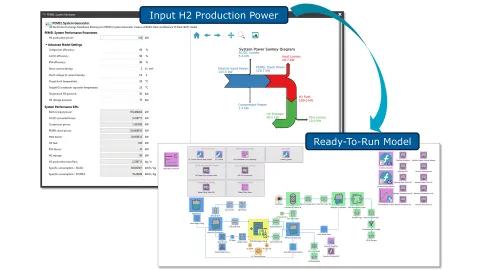
PEM 전해조 시스템 제너레이터 – 하나의 KPI로 완성하는 시스템 모델
이번 버전에서는 Proton Exchange Membrane Electrolyzer(PEMEL) 스택 및 Balance of Plant(BoP) 모델 구성을 지원하는 새로운 제너레이터가 CRUISE M에 추가되었습니다. 단일 스택 입력과 선택적인 BoP 컴포넌트 효율, 운전점 정보만으로 시스템을 설정할 수 있습니다. Efficiency Portal에서 PEMEL System Generator를 실행하면, 새롭게 추가된 피드백 기능을 확인할 수 있습니다. 입력한 KPI를 기반으로 스택 및 시스템 전체에 대해 전력 손실, 특정 전력 소비량 등 시스템 KPI에 대한 초기 추정치를 제공합니다. 또한, 입력 전력에서 생성 수소까지의 전력 분할(power split)을 시각화하는 생키 다이어그램도 제공됩니다. 마지막으로 Finish 버튼을 클릭하면, 적절히 스케일링된 분리기, 탱크, 밸브 및 기타 컴포넌트뿐 아니라 전체 시스템을 운전하기 위한 모니터 및 제어를 포함한 상세 BoP 모델이 생성됩니다.
AEM 전해조 스택 – 성능 모델
Anion Exchange Membrane(AEM) 전해조는 PEM 전해조에 대한 비용 효율적인 대안으로 주목받고 있습니다. AEM 시스템은 PGM(Platinum Group Metals) 사용을 피하면서도, PEM 시스템과 유사한 전력 및 효율 특성을 제공할 수 있습니다. AEM 전기분해에서는 음극(cathode)에서 생성된 OH⁻ 이온이 막을 통과해 양극(anode)으로 이동하며, 음극에서는 수소가스가, 양극에서는 산소가 생산됩니다. 이를 바탕으로 이번 CRUISE M 버전에는 새 AEM Electrolyzer Stack 컴포넌트가 추가되었습니다. 이 컴포넌트에서는 1D 또는 2D 해상도 선택, 형상, 압력강하, 전기화학 수송, 열 모델, 반응물 크로스오버 모델 설정, 막 재료 데이터에 대한 완전 접근이 가능합니다. 새로운 설치 예제에서는, 문헌상의 다양한 KOH 농도 데이터를 사용하여 시뮬레이션과 계측 결과를 비교하고, 운전 조건 및 전해질 공급 구성에 따른 스택 모델의 민감도를 추가로 분석합니다.

Thermodynamics and Exhaust Aftertreatment System
연소 해석 위저드(Combustion Analysis Wizard) – 열역학 프로세스 마스터링
AVL BOOST™의 BURN을 계승한 Combustion Analysis Wizard는 계측 데이터를 기반으로 ROHR 테이블 또는 VIBE 파라미터를 도출하여, CRUISE M 내 실린더 내 연소 모델링에 활용할 수 있도록 합니다. 위저드는 주어진 사이클 타입, 실린더 형상, 연료 특성, 벽 온도 및 열전달, 공기 및 연료 유량, 그리고 가장 중요한 다수 운전점에서의 고압 곡선 등을 고려한 파라미터화 과정을 단계적으로 안내합니다.
이번 CRUISE M 버전에서는 위저드의 적용 범위가 세 가지 측면에서 확장되었습니다.
- iFiles 임포트: iFiles는 고압 실린더 트레이스를 저장하기 위한 업계 표준 형식으로 볼 수 있습니다. 이제 CRUISE M은 이 파일 형식에서의 데이터 임포트를 지원합니다.
- 증발 잠열(heat of evaporation): 연소 해석의 정밀도를 높이고자 할 경우, 증발 잠열에 대한 접근이 추가적인 유연성을 제공합니다.
- 요약 페이지: 여러 운전점에 대해 연소 해석을 수행할 때, 상세 결과를 확인하려면 개별 케이스를 일일이 살펴봐야 했습니다. 이번 버전에서는 공통 요약 페이지에서 전체 결과를 한눈에 확인할 수 있습니다.

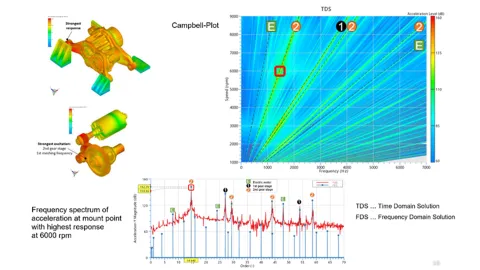
향상된 주파수 영역 해석(FDS, Frequency Domain Solution)
FDS는 초기 설계 단계에서 기어박스 시스템 및 e-Drive의 NVH 거동을 분석하기 위해 사용되는 단순화된 방법입니다. 이 방법은 정상 상태 운전만을 다루며, 조인트의 비선형 특성은 제외합니다. 동일한 AVL EXCITE™ M 모델에서, 보다 정밀한 시간 영역 해석(TDS, Time Domain Solution) 또는 FDS를 실행할 수 있어, 상세 트러블슈팅과 초기 단계 NVH 시뮬레이션을 모두 지원합니다.
이번 릴리스에서의 FDS 개선 사항은 다음과 같습니다.
- 기구정역학 해(solution, Kinetostatic Solution): 외력 불균형에 대한 내성이 향상되고, 보다 높은 정확도를 제공합니다.
- 기어 여기(gear excitation): TCA(Tooth Contact Analysis)는 이제 전체 시스템의 정적 평형을 기반으로 하며, 각도 불정렬 및 치면 마이크로기어 형상(microgeometry)을 고려합니다.
- 전기 모터 여기: 모든 유형의 전기모터 조인트에 대해, 기저 전기 네트워크의 정상 운전점을 가정하여 여기력을 고려합니다.
- 결과 출력: 이제 조인트 레벨에서 결과를 확인할 수 있습니다. 기어 및 전기 모터에서 발생하는 여기력은 더 이상 외력/외부 모멘트로만 처리되지 않고, 조인트 레벨에서 직접 고려됩니다.
- 성능 향상: 기어 TCA 및 전기 모터 조인트 힘 계산이 해석기(solver)에 직접 통합되어 여기력 준비에 필요한 시간이 줄어들었습니다.
조인트 결과의 효율적인 저장 및 내비게이션
모든 조인트 관련 결과가 새 HDF5 기반 결과 포맷으로 완전히 마이그레이션되었습니다. 이 포맷에서는 각 컴포넌트가 단일 통합 결과 파일을 사용합니다. 주요 목표 중 하나는 결과 이름에 대한 혼란을 제거하는 것이었습니다.
이번 릴리스에서:
- 결과는 모델 설정 및 선택 시에 정의한 정확한 이름을 그대로 사용합니다.
- 일관된 네이밍 규칙으로 결과를 찾고 이해하기가 쉬워졌습니다.
- 논리적인 결과 그룹화로 워크플로우의 구조와 명확성이 개선되었습니다.
사용 경험 또한 전반적으로 간소화되고 효율화되었습니다.
- 단순하고 직관적인 트리 구조를 통해 더 적은 클릭으로 데이터에 접근할 수 있습니다.
- 검색 기능 통합이 개선되었으며, 시뮬레이션 시간과 저장 공간 요구가 모두 감소했습니다.
- 선택적 출력 제어를 통해, 시뮬레이션 전에 평가 대상 조인트 결과 또는 바디 노드를 정확히 선택할 수 있습니다.
Oil Supply Line (OSL) 네트워크
OSL 네트워크는 AVL EXCITE™ Power Unit에서 EXCITE M으로 마이그레이션되었습니다. OSL은 베어링 시스템 간 오일 흐름을 모델링하며, 여러 베어링을 구조화된 오일 라인 네트워크로 연결합니다.
주요 기능은 다음과 같습니다.
- 운동이 OSL에 미치는 영향: 직선, 원심, 코리올리, 오일러 힘을 고려해 시스템 운동에 따른 압력 분포 변화를 반영합니다.
- 배관 캐비테이션 모델링: 베어링 갭 캐비테이션과 구분되는 OSL 내부의 캐비테이션 발생을 평가합니다.
- 구성 가능한 OSL 설계: EHD2 타입 베어링을 지원하며, 직선, T-라인, I-라인, 더블 I-라인, 멀티 스트레이트 라인 등 다양한 토폴로지를 지원합니다.
- 유압 네트워크 상호작용: 여러 OSL 구성이 서로 연결될 수 있으며, 겹치는 보어를 커플링된 시스템으로 취급합니다.
- 유량 및 압력 고려: 마찰 손실(층류/난류), 배관 온도에 따른 점도 변화, 입·출구 압력 손실, 질량 보존 등을 고려합니다.
- 캐비테이션 검출 및 평가: 라인 상에서 기화 지점을 식별하고, 오일 컬럼의 분리 및 재결합 거동을 평가합니다.
- 펌핑 효과 구현: 회전체 내부에서 원심력에 의해 유도되는 오일 수송을 모델링합니다.
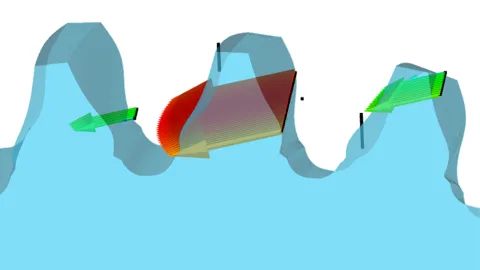
확장된 제너릭 콘투어 접촉(Extended Generic Contour Contact)
최신 콘투어 접촉 기능 개선으로, 노달 변형(nodal deformation)과 멀티 노드 접촉 거동을 지원하여 유연성과 현실성이 크게 향상되었습니다. 이전까지 콘투어 조인트는 1:1(단일 노드) 접촉에만 제한되어 있었습니다. 새로운 기능은 단일 노드 – 다중 노드 접촉을 지원하여, 복잡한 형상과 탄성 컴포넌트에 대한 보다 정확한 시뮬레이션 결과를 제공합니다.
이번 릴리스의 핵심 개선 사항은 다음과 같습니다.
- 콘투어 위치를 위한 적응형 기준 노드(adaptive reference node)
- 다중 노드에 걸친 스마트 접촉력 분배
- 콘투어 평면에 수직한 방향의 마찰력 평가

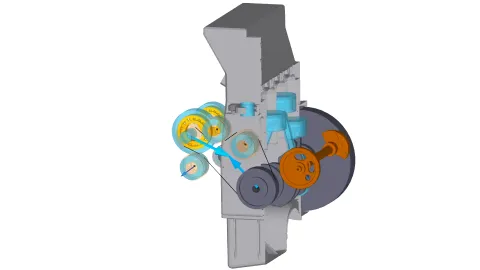
개선된 벨트 드라이브 조인트
새로운 벨트 드라이브 조인트는 풀리의 임의의 전역(global) 운동을 완전히 지원합니다. 이를 통해, 벨트 스타터 제너레이터나 스타트/스톱 매뉴버처럼, 풀리의 전역 움직임이 큰 시나리오에서 벨트 동역학을 정밀하게 시뮬레이션할 수 있습니다.
조인트는 사용자 인터페이스에서 벨트 스팬을 직관적으로 시각화하며, 결과로 발생하는 풀리 힘과 모멘트의 애니메이션은 AVL IMPRESS™ M의 3D 애니메이션에서 확인할 수 있습니다.
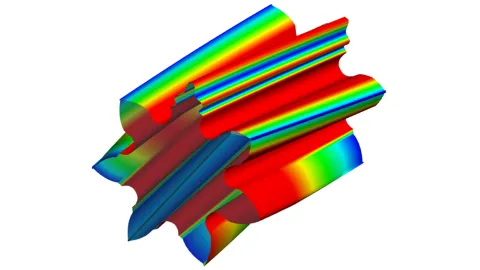
원통 기어의 고급 마이크로지오메트리 정의
사전에 정의된 수정 타입에 대한 마이크로지오메트리 정의 옵션이 확장되어, 마이크로지오메트리를 훨씬 유연하게 설정할 수 있습니다. 새롭게 제공되는 기능은 다음과 같습니다.
- 다중 수정 인스턴스: 각 수정 타입에 대해 독립적인 파라미터를 가진 여러 인스턴스를 정의 가능
- 치별(tooth-specific) 적용: 각 치에 대해 별도로 정의하여 설계 유연성 확보
- 확장된 웨이브니스(waviness) 정의:
- 이제 치면(profile) 방향에 제한되지 않고, 치 플랭크(flank)의 임의 방향에 적용 가능
- 접촉선(contact line) 방향과 동기화 가능
- 맞물림 경로(engagement path)를 따라 특정 차수(order)를 정의할 수 있음
이를 통해 제조 공차로 인해 발생하는 웨이브니스를 모델링하거나, 특정 맞물림 차수를 줄이기 위해 접촉선 동기화 웨이브니스를 의도적으로 설계할 수 있습니다.
SKF 정격 수명 – 전동 요소 베어링
이제 애플리케이션에서 SKF의 클라우드 기반 수명 계산 서비스를 이용해 SKF 베어링의 수명을 예측할 수 있습니다. SKF 계정 등록 후 온라인 서비스를 사용할 수 있으며, 기본 정격 수명 L10은 물론, 보다 포괄적인 접근법인 SKF 특수 정격 수명 L10m도 제공합니다.

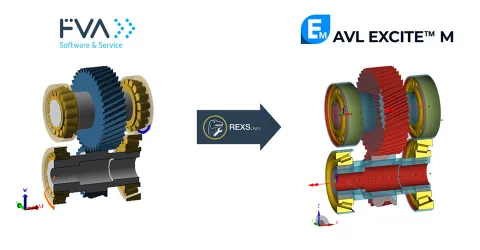
향상된 REXS 임포트 기능
REXS 임포트는 새로운 샤프트 모델러 기능 통합 및 추가 커스터마이즈 옵션을 통해 개선되었습니다.
- 향상된 샤프트 임포트: 내측과 외측 샤프트 레이아웃을 분리해 가져올 수 있어, 보어의 시각화도 개선됩니다.
- 최대 강성 상한 설정: 상한값을 임계값으로 정의할 수 있어, 이상적으로 강성이 높은 접속부로 인해 발생하는 수치 문제를 줄여줍니다.
- 작은 샤프트 세그먼트 무시: 샤프트 서브컴포넌트의 최소 폭을 지정해, 매우 작은 샤프트 세그먼트 생성을 피할 수 있습니다.
- 플로팅 베어링 조립체 옵션: 플로팅 베어링 어셈블리를 자동 생성해 모델 설정을 단순화합니다.
- 싱글 캐리어 바디: 사이드 플레이트, 핀, 중앙 샤프트 등 모든 캐리어 관련 컴포넌트를 하나의 캐리어 바디로 병합할 수 있습니다. 이때 내부 조인트는 자동으로 제거되어 모델이 단순해지고 복잡도가 줄어듭니다.

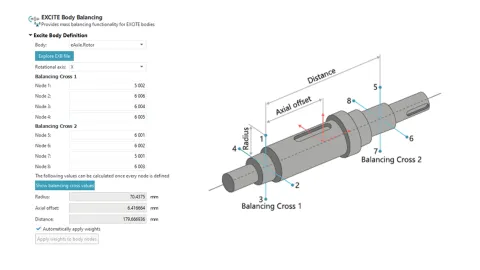
바디 밸런싱 애플리케이션
회전체의 불평형(unbalance)은 진동, 베어링 마모, 재료 응력 증가를 초래합니다. 실제로 대부분의 고속 회전 부품은 구조물에 카운터웨이트를 추가하여 밸런싱을 수행합니다.
- 밸런싱의 목표는 질량 분포를 조정하여 다음을 만족시키는 것입니다.
- 질량 중심이 회전축 위에 위치
- 관성축이 회전축과 일치
실제 대부분의 경우 정적·동적 불평형이 동시에 발생하므로, 두 가지를 함께 보정해야 합니다. EXCITE M의 Body Balancing App은 이러한 밸런싱 절차를 자동으로 수행하여, 불평형을 완전히 상쇄합니다.
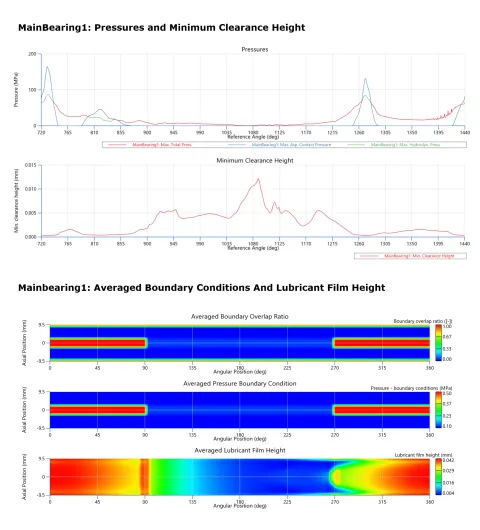
EHD 리포트 생성 애플리케이션
MFC-Based Model for Induction Motor
EXCITE M 시뮬레이션 후, 고급 방사형 슬라이더 베어링(EHD2)에 대한 포스트프로세싱 기능을 강화하기 위한 새로운 애플리케이션이 추가되었습니다. 이 도구는 EXCITE Power Unit에서 제공되던 것과 유사한 표준화 리포트를 자동으로 생성합니다.
주요 기능:
- 원활한 통합: EXCITE M 앱 라이브러리에서 바로 접근 가능
- 자동 리포트 생성: IMPRESS M 및 PowerPoint 형식으로 리포트 생성
- 사용자 정의 결과 선택: 스칼라 및 후처리된 2D 결과를 선택 가능
- 포괄적인 데이터 표현:
- 평균 결과: 경계 조건, 클리어런스 높이, 필 비율(fill ratio), 윤활유 필름 높이, 윤활유 특성, 윤활유 온도, 압력 및 열 하중
- 최대 전체 압력 및 최소 클리어런스 높이에서의 결과: 클리어런스 높이, 필 비율, 윤활유 필름 높이, 압력
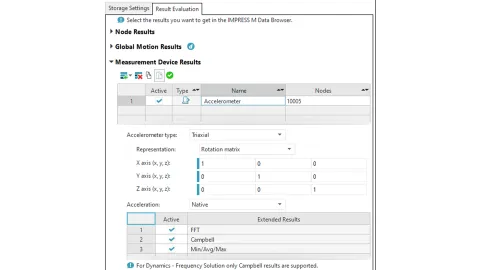
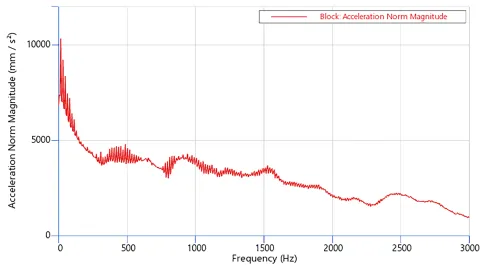
가상 가속도계(Virtual Accelerometer) 개선
기존 EXCITE M의 가상 가속도계 센서 결과가 3축(triaxial) 가속도계 타입까지 확장되었습니다. 센서 타입과 더불어, 센서의 방향을 원하는 대로 정의할 수 있어, 모델 내 센서 정의에 필요한 시간이 줄어듭니다.
더 스마트한 엔지니어링 의사결정 지원
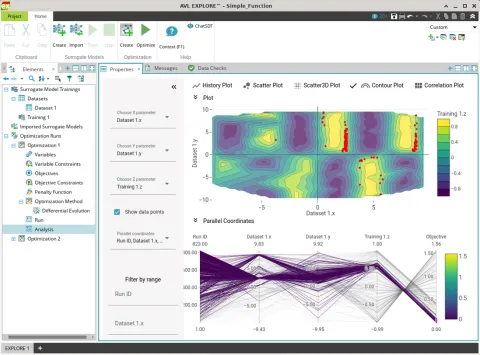
AVL EXPLORE™는 시뮬레이션 및 테스트 데이터를 생동감 있게 시각화하여, 실제로 활용 가능한 엔지니어링 인사이트로 전환해 줍니다. 서러게이트 모델(surrogate model) 생성, 설계 공간 탐색, 최적화, 디지털 트윈 구축 등 강력한 기능을 통해, 엔지니어가 데이터에서 의사결정으로 빠르고 효율적으로 이동할 수 있도록 지원합니다.
오늘날의 빠른 개발 환경에서 EXPLORE는 백그라운드에서 머신러닝을 처리하고, 사용자는 엔지니어링 결과에만 집중할 수 있는 간결하고 직관적인 인터페이스를 제공합니다. SDT 에코시스템과 완전 통합되어 있어, 익숙하고 매끄러운 사용자 경험을 보장합니다.
- 많은 시간이 소요되는 시뮬레이션을 고속 서러게이트 모델로 대체
- 설계 대안을 탐색하고, 트레이드오프를 손쉽게 평가
- 내장 알고리즘을 사용해 시스템 성능 최적화
- 예측 분석을 위한 디지털 트윈 생성
- FMU로 모델을 내보내 SDT 지원 워크플로우에 통합
- 시뮬레이션 또는 시험 데이터를 기반으로 서러게이트 모델 구축
- 서러게이트 모델을 최적화하여 성능 향상
AVL FIRE™ M은 각 릴리스마다 모빌리티 및 기타 산업 분야에서 최근 등장한 기술 트렌드와 예상되는 미래 트렌드에 대응하는 기능과 시뮬레이션 역량을 제공합니다. 2025 R2에서는 특히 연료전지 및 전해조 개발을 가속화하기 위한 새로운·개선된 시뮬레이션 모델에 초점을 두었습니다. 가상 배터리 개발 측면에서는 프로젝트 리드타임의 대폭 단축과 정확한 물리 모델 제공을 목표로 삼았습니다.
Fuel Cells and Electrolyzers
PEM 연료전지 에어 스타트업(Air Startup)
FIRE M 2025 R2 릴리스에서는 PEM 연료전지 시뮬레이션 기능이 크게 강화되었습니다. 그 가운데 핵심은 완전히 현실적인 에어 스타트업 시나리오를 모델링할 수 있게 된 것입니다. 이를 위해 성능(performance) 모델에 여러 가지 확장이 통합되어, 복잡한 전기화학 프로세스가 보다 정확하게 표현됩니다.
양극에서의 산소 환원 반응(ORR): 에어 스타트업 동안에는 통상적으로 캐소드에서만 발생하던 ORR이 애노드에서도 발생합니다. 이 거동은 스타트업 시 관찰되는 캐소드 전위 급상승의 주요 원인입니다.
캐소드에서의 강화된 탄소 산화 메커니즘: 에어 스타트업 조건에서 캐소드 전위는 1.5 V 이상으로 상승할 수 있으며, 이는 탄소 지지체의 부식을 야기합니다. 이를 보다 충실히 모델링하기 위해, 전압 1 V 이상 영역에 적용되는 두 번째 탄소 산화 메커니즘이 도입되었습니다. 이 메커니즘은 여섯 가지 산화물 종과 일곱 개의 전기화학 반응을 포함합니다.
애노드에서의 플래티넘 산화: 스타트업 초기에 애노드 전위는 약 1 V에 이르러, 정상 운전 시보다 훨씬 높습니다. 이로 인해 플래티넘 산화가 캐소드뿐 아니라 애노드에서도 중요해지며, 이에 따라 모델에 포함되었습니다.
전기화학 이중층 용량(Electrochemical Double Layer Capacity): 스타트업 동안 전압이 동적으로 변동하기 때문에, 전기화학 이중층의 커패시턴스 거동을 고려하는 것이 필수적입니다. 이는 애노드와 캐소드의 국부 전위 분포에 큰 영향을 미치며, 이번 버전에서는 이를 명시적으로 고려합니다.
이러한 개선을 통해 실제 운전 조건을 반영한 연료전지 설계 및 해석의 신뢰도가 한층 강화되었습니다.
Figure 1 shows typical air start-up scenario in a PEM Fuel Cell.

PEM 전해조 열화(Degradation) 모델
FIRE M 2025 R2에서는 PEM 전해조를 위한 최초의 열화(degradation) 모델이 도입되면서 중요한 이정표를 달성했습니다. 이 모델은 시스템 성능과 수명에 영향을 미치는 핵심 열화 메커니즘을 상세하게 표현합니다.
주요 열화 효과 중 하나는 화학적 이오노머 열화입니다. 이 과정은 산소 크로스오버로 시작되며, 이로 인해 과산화수소(H₂O₂)가 형성됩니다. 금속 이온이 존재할 경우 H₂O₂는 매우 반응성이 높은 OH 라디칼을 생성하고, 이는 이오노머의 측쇄 및 주쇄를 공격해 이온 전도도 감소 및 멤브레인/촉매층의 박화를 유도합니다. 이 열화는 특히 캐소드 촉매층에서 두드러지며, 이는 주로 0.7 V 이하 전압에서 H₂O₂가 형성되기 때문입니다.
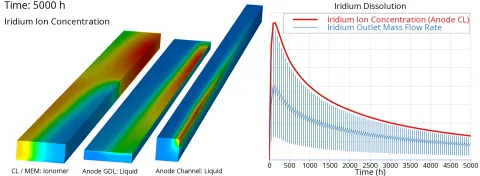
또 다른 중요한 메커니즘은 애노드에서의 이리듐 용해 및 재석출(iridium dissolution/redeposition)입니다. 높은 전위에서 이리듐 또는 그 산화물은 플래티넘과 유사하게 용해될 수 있으며, 용해된 이리듐 이온은 멤브레인 내부로 이동하거나 과잉 공급수와 함께 배출될 수 있습니다. 이는 촉매 물질 손실뿐 아니라 오스트발트 숙성(Ostwald ripening)을 일으켜, 더 큰 입자에 이리듐 이온이 재석출되면서 전기화학 활성 면적(ECSA)이 감소하게 됩니다.
모델은 또한 캐소드에서 발생하는 탄소 및 플래티넘 열화(탄소 산화, 플래티넘 산화, 탄소 부식, 입자 탈리 및 응집 등) 현상도 고려합니다. 이러한 효과는 연료전지 캐소드에서 잘 알려져 있지만, PEM 전해조에서는 통상적으로 낮은 국부 전위 때문에 상대적으로 덜 두드러집니다.
연료전지와 마찬가지로, FIRE M의 열화 모델은 성능 모델과 완전히 커플링되어 있습니다. 이를 통해 시간에 따라 열화가 주요 물리·전기화학적 특성에 미치는 영향을 동적으로 시뮬레이션할 수 있습니다.
또한 시뮬레이션 시간을 지원하기 위해, 열화 모델은 FIRE M 연료전지 및 전해조 모듈에서 검증된 서브사이클링(subcycling) 기법과 호환됩니다. 이를 통해, 장기간 및 다수 부하 사이클을 효율적으로 계산하면서도 적절한 계산 시간을 유지할 수 있습니다.
고체 산화물 연료전지(SOFC) 핫 박스 – 복사 열전달 시뮬레이션
FIRE M은 이제 SOFC 스택 모델과 외부 개질기(reformer) 모델을 단일 도메인 내 이종 화학 모듈(heterogeneous chemistry module)과 결합하여, 완전한 SOFC 핫 박스(hot box)를 시뮬레이션할 수 있습니다. 이를 통해 고온 조건에서의 촉매 연료 개질 및 전기화학 변환 프로세스를 보다 현실적으로 표현할 수 있으며, 시스템 레벨 시뮬레이션의 정확도와 충실도가 향상됩니다.
많은 SOFC 시스템은 열 차폐된 인클로저 내에서 운전됩니다. 이러한 환경에서는 고온 컴포넌트와 주변 벽 사이의 표면-대-표면(surface-to-surface) 복사가 열전달에서 중요한 역할을 합니다. 이를 정확히 포착하기 위해, FIRE M은 관련 모든 도메인에서 복사 모듈 적용을 완벽히 지원합니다. 덕분에 복사 열교환을 정교하게 모델링하고, 시스템 전반의 온도 분포를 보다 정밀하게 예측할 수 있습니다.
Battery
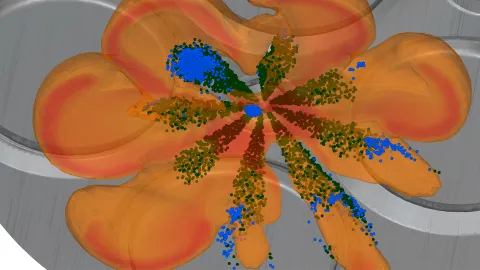
배터리 열폭주 – 결합된 반응속도/벤트/입자 모델
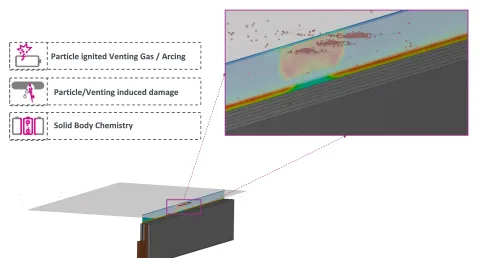
새로운 반응속도(kinetic) 모델링은 고체 영역의 발열과 벤팅 가스 및 입자 배출을 하나의 프레임워크에서 연결해, 단일 배터리 셀에서 열폭주(thermal runaway) 시 관찰되는 현상을 통합적으로 표현합니다. 열폭주 동안 발생하는 벤트 가스의 양은 반응 메커니즘과 증발 모델을 통해 계산됩니다.
또한, 배출된 입자는 주변 환경과 상호작용하며, 열전달과 입자 충돌 시 고체로 전달되는 운동 에너지에 대한 정보를 제공합니다.
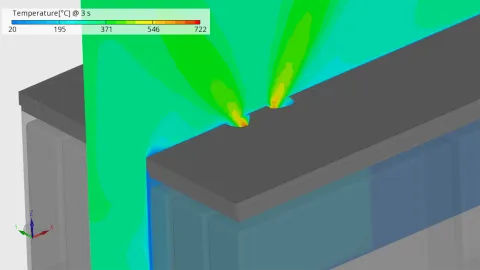
GPU 기반 배터리 열폭주 시뮬레이션
2025 R1에서는 에너지 방정식 없이 단상 유동에 대한 임베디드 바디(embedded body) 시뮬레이션이 GPU에서 지원되었습니다. FIRE M 2025 R2에서는 단상 유동의 임베디드 바디 시뮬레이션을 에너지 방정식 없이 또는 포함한 경우 모두, 그리고 임베디드 바디 인터페이스(질량 소스 포함)를 GPU 유동 해석기에 올려 실행할 수 있습니다. 이전에 제공되었던 열 다중 재료 도메인(thermal multi-material domain) 시뮬레이션과 종(species) 수송 기능과 결합하면, 배터리 열폭주 시뮬레이션을 이제 완전히 GPU 노드에서 수행할 수 있습니다.
등가회로(equivalent-circuit) 모델 개선
등가회로 배터리 모델은 새롭게 추가된 입력값인 “열전기 감도(thermoelectric sensitivity)”를 통해, 전기화학 반응에서 엔트로피 변화로 인한 가역 열(reversible heat)을 고려할 수 있게 되었습니다.
ICE 기반 파워트레인
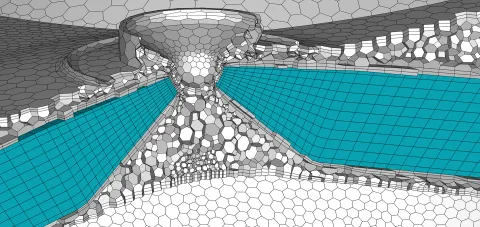
스프레이블록(sprayblock)이 포함된 내연기관(IC) 모델
임의로 지향된 연산 격자를 사용하는 경우에도 스프레이블록을 활용하면, 수치 확산을 효율적으로 줄이고 연료 스프레이 및 가스 제트 계산의 정확도를 크게 높일 수 있어, 최근 널리 사용되고 있습니다.
FIRE M Engine에서 폴리메시(polymesh)를 사용할 때, 사용자는 도구의 임베딩 기능을 활용해 기존 메쉬를 모델에 통합할 수 있습니다. 대표적인 사용 사례는 연료 분사 구간 동안 스프레이 영역에 구조화된 블록메쉬를 삽입하는 것입니다. 지금까지 이러한 블록메쉬는 대부분 FIRE M에 포함된 블록메셔(blockmesher)를 이용해 수동으로 생성되었습니다.
2025 R2에서는 스프레이블록 정의가 훨씬 더 쉽고 빠르게 변경되었습니다. 이를 위해 단일 블록 템플릿과 이중 블록 템플릿 두 가지 템플릿이 제공됩니다. 템플릿은 기하, 정렬, 이산화(discretization) 파라미터 세트로 손쉽게 맞출 수 있으며, 선택한 템플릿의 스케치는 파라미터 변경에 따라 즉시 업데이트됩니다. “Create mesh” 기능을 통해 실제 엔진 형상 대비 스프레이블록의 위치와 크기를 정확히 확인할 수 있습니다. 하나의 FIRE M Engine 프로젝트에서 여러 스프레이블록을 사용할 수 있으며, 지정한 크랭크각 범위에 따라 활성화할 수 있습니다.
일반 기체 반응 모델의 고속 해석
실제 경험에 따르면, 내연기관 연소 시뮬레이션이나 기타 용도로 사용되는 많은 화학 반응 메커니즘은 불필요하게 크며, 문제 해결에 꼭 필요하지 않은 종(species)과 반응이 과도하게 포함된 경우가 많습니다. 이는 계산 시간을 불필요하게, 때로는 과도하게 늘리는 원인이 됩니다.
이를 해결하기 위해, 이제 문제 해결에 필수적인 구성 요소만을 남기도록 반응 메커니즘을 축소(reduction)하는 기능을 제공합니다. FIRE M 2025 R2의 sdt_python 모듈은 커맨드라인 호출과 컨트롤 파일을 통해 매우 간단하게 반응 메커니즘을 축소할 수 있는 명령을 제공합니다. 이렇게 축소된 메커니즘을 사용하면, 반응 화학 시뮬레이션의 런타임을 단축할 수 있습니다.
ASAM OpenSCENARIO® XML 기술을 AVL Scenario Designer™에서 직접 활용
ASAM OpenSCENARIO® 표준에 대한 네이티브 지원과 직관적인 사용성이 결합된 것이 AVL Scenario Designer™의 큰 장점입니다. 이번 릴리스에서는 모든 사용자 입력 필드의 툴팁 정보에 공식 표준 문서에서 직접 가져온 필드 설명을 제공하도록 강화했습니다. 덕분에 사용자는 특정 입력 필드의 의미를 확인하기 위해 표준 문서를 찾아볼 필요 없이, 필드 위에 마우스를 올리기만 하면 ASAM 표준에서 가져온 설명을 바로 확인할 수 있습니다.
Video 1: Input field tooltip descriptions directly from ASAM OpenSCENARIO® standard.
Video 1에서는 속도 변경 액션(speed change action)의 shape 속성에 대해 이 기능이 어떻게 동작하는지 보여줍니다. cubic, linear, sinusoidal, step 정의가 사용자 선택에 따라 툴팁에 자동으로 표시됩니다. 이 기능은 ASAM 표준에 대한 AVL의 지속적인 커밋을 잘 보여줍니다.
Esmini – 대체 프리뷰 재생 엔진 도입
Esmini는 복잡한 인프라 없이도 ASAM 표준 기반 시나리오를 해석하고 재생할 수 있는 간단하고 신뢰성 높은 도구로, OpenSCENARIO 커뮤니티에서 널리 사용되고 있습니다. 일관된 거동과 오픈소스의 투명성 덕분에, 시나리오가 다양한 환경에서 예상대로 실행된다는 신뢰를 제공합니다. AVL Scenario Designer™에 esmini를 통합함으로써, 사용자는 독립 실행형 esmini에서 재생했을 때와 동일한 거동을 보이는 시나리오를 설계할 수 있습니다. 이는 잘못된 해석 가능성을 줄이고, 검증 과정에서 시간을 절약할 수 있도록 돕습니다. 설계와 재생 간의 이러한 정렬은 워크플로우를 원활하게 하고 시나리오 개발자에게 보다 예측 가능한 결과를 제공합니다.
Video 2: Switching the playback engine in AVL Scenario Designer™
Video 2에서 볼 수 있듯이, 사용자는 내부 시나리오 인터프리터에서 esmini로, 또는 그 반대로 재생 엔진을 매우 쉽게 전환할 수 있습니다. 재생 엔진은 백엔드에서 궤적 프리뷰 및 이벤트 타임라인 정보를 계산하는 데만 사용되므로, 시나리오 설계 워크플로우의 사용자 경험은 재생 엔진과 무관하게 일관성을 유지합니다. 오픈 아키텍처를 바탕으로 다른 시뮬레이터의 출력을 통합하여, 사용자가 목표 시뮬레이터에 맞는 시나리오를 설계할 수 있도록 지원합니다. 더 자세한 내용이 필요하시면 언제든지 문의해 주십시오.
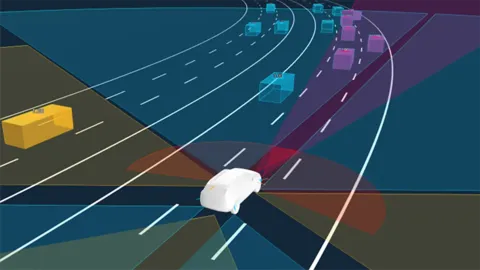
AVL DRIVE™ 기반 가상 승객 안락감 평가(Virtual Passenger Comfort Rating)
자율주행에서 승객 안락감(passenger comfort)은 중요한 차별화 요소입니다. 이메일을 확인하며 커피를 마시는 로보택시 승객이든, 공항 셔틀에서 부드러운 가감속을 기대하는 입석 승객이든, 승차감은 시스템에 대한 신뢰를 형성하는 핵심 요소입니다.
이 통합 솔루션은 시나리오 기반 안전성 테스트 결과를 바탕으로 주행성(drivability) 및 승객 안락감을 추가 분석합니다. 이를 통해 고객은 ADAS 및 자율주행차(AV)의 캘리브레이션을 최적화하여, 안전성을 저해하지 않으면서 부드럽고 쾌적한 승차감을 제공하는 주행 특성을 구현할 수 있습니다.

관련 솔루션에 대해 더 알고 싶으시다면, 웨비나를 확인해 보십시오.
ASAM OSI® 센서를 활용한 하이레벨 센서 퓨전
AVL Scenario Simulator™는 이제 하이레벨 센서 퓨전 워크플로우를 지원하여, 원시(raw) 데이터 대신 검출된 객체(detected objects)와 같은 해석된 센서 출력을 사용해 인지 시스템을 검증할 수 있습니다. 이 접근법은 개별 센서 처리를 독립적으로 수행할 수 있게 해 개발을 단순화하고, 검증된 알고리즘의 재사용 및 디버깅·프로토타이핑 속도를 높이는 데 도움이 됩니다. 시뮬레이터의 통계적 센서 모델은 실시간 대비 최대 1000배 빠른 속도로 실행되며, 센서 범위나 가우시안 노이즈와 같은 효과를 파라미터로 조정할 수 있어, 테스트 커버리지를 극대화하고 센서 구성에 대한 벤치마킹을 효율적으로 수행할 수 있습니다.
더 많은 정보와 라이브 데모는 웨비나에서 확인하실 수 있습니다.
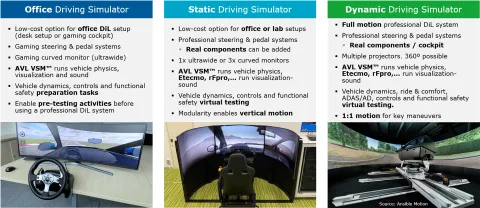
AVL VSM™ – 턴키 드라이빙 시뮬레이터, 새로운 제어 구성(DiL), Virtual Studio Dynamics 통합
정적부터 풀 다이내믹까지 – 턴키 드라이빙 시뮬레이터
전문 드라이빙 시뮬레이터의 구축, 구성 및 유지 관리는 복잡하고 시간이 많이 소요될 수 있습니다. AVL은 이러한 과제를 충분히 이해하고 있으며, 고객이 공통적으로 겪는 문제를 제거하기 위해 설계된 턴키(turn-key) 솔루션을 제공합니다. AVL의 통합 도구 체인은 처음부터 끝까지 매끄러운 경험을 제공하여, 고객이 진정으로 중요한 고효율·고품질 버추얼 개발에 집중할 수 있도록 합니다.
AVL의 강점 중 하나는 소프트웨어와 하드웨어 전반에 걸친 완전한 도구 통합입니다. 이 일관된 접근법 덕분에 모든 요소가 정밀하게 연동되며, 신뢰할 수 있고 정확한 시뮬레이션 환경을 제공합니다. 또한, 상관 검증된(vehicle-correlated) 차량 모델이 포함되어 있어 새로운 DiL 시스템과 관련 메서드 도입 시 리스크를 낮추고 구현 속도를 높여 줍니다.
효율성을 추가로 강화하기 위해, AVL은 고객의 특정 니즈와 적용 분야에 맞춘 전문 교육 프로그램을 제공합니다. 이를 통해 고객 팀은 기술을 빠르게 숙달하고, 시스템 구성이나 적용 대상과 무관하게 드라이빙 시뮬레이터의 잠재력을 최대한 발휘할 수 있습니다. AVL 턴키 드라이빙 시뮬레이터는 개발 시간과 비용을 줄이면서도 높은 정밀도와 개발 효율성을 보장합니다.
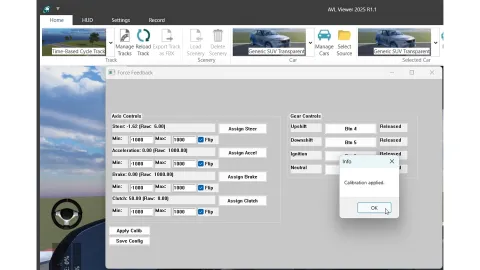
새로운 드라이빙 시뮬레이터 제어 구성
새롭게 도입된 드라이버 제어(driver controls) 구성 및 캘리브레이션 기능을 통해, 사용자는 스티어링, 페달, 변속기, 점화 등 운전 인터페이스의 다양한 요소를 테스트 목적이나 드라이버 선호에 맞게 조정할 수 있습니다. 이러한 적응성은 다양한 타입의 드라이빙 시뮬레이터와 사용 사례 전반에서 현실적이고 재현 가능한 결과를 얻는 데 핵심입니다.
이 시스템은 높은 범용성을 염두에 두고 설계되어, 오피스 기반 구성부터 전문 Driver-in-the-Loop(DiL) 환경까지 폭넓은 하드웨어 구성을 지원합니다. 초기 개발 단계 테스트는 물론, 고정밀 검증 단계에서도 이 유연한 구성은 매끄러운 통합과 일관된 성능을 보장합니다.
해당 솔루션은 AVL VSM™을 다양한 상용 스티어링 및 페달 시스템과 연결하여, 호환성과 확장성을 확보합니다. 그 결과, 실제 차량 거동을 충실히 반영하는 직관적이고 정밀하며 신뢰성 높은 드라이버 제어를 제공하여, 엔지니어가 의미 있는 데이터를 빠르게 확보하고 성능 최적화를 가속할 수 있습니다.
AVL VSM™ – Virtual Studio Dynamics 2025 통합
VSM은 이제 Virtual Studio Dynamics 플랫폼과 완전 통합되어, 시뮬레이션과 여러 물리 테스트베드 간의 원활한 상호작용을 지원합니다. 이 강력한 통합은 버추얼과 실차/실험 환경 사이의 간극을 메워, 엔지니어가 차량 기능, 시스템, 컴포넌트를 통합적이고 효율적인 워크플로우에서 개발·검증·튜닝할 수 있도록 합니다.
이를 통해 사용자는 에너지 매니지먼트, 차량 동역학, 주행성, 안전성과 같은 핵심 차량 속성을, 아스팔트, 저마찰 노면, 오프로드, 서킷 등 다양한 환경에서 시험할 수 있습니다. 또한, AI 기반 모델링을 통해 단 이틀 만에 버추얼 트윈을 생성할 수 있어 개발 타임라인을 크게 단축합니다.
고객은 즉시 사용 가능한 차량 및 테스트 템플릿, 준비 시간 40% 단축, 90% 이상의 높은 상관 품질 등 이점을 얻을 수 있습니다. 단일 모델을 여러 환경에서 활용할 수 있어, 개발 과정 전반에 걸쳐 유연성, 일관성, 확장성을 확보할 수 있습니다. 시뮬레이션과 테스트는 이제 어느 때보다 효율적이고 정확하며 적응력이 뛰어난 도구가 되었습니다.
최신 버전 Model.CONNECT™는 공동 개발 및 테스트를 위한 코시뮬레이션·통합 플랫폼으로, 특히 Software-in-the-Loop(SiL) 환경에서 협업 효율을 극대화하도록 설계되었습니다. 이번 릴리스에서는 팀이 SiL 워크플로우를 보다 효율적이고 혁신적으로 통합·검증·최적화할 수 있도록 지원하는 고급 기능들이 추가되었습니다.
주요 신규 기능은 다음과 같습니다:
- Collaboration Server – 분산형 IP 보호 코시뮬레이션
- FMI 3.0 Layered Standard virtual bus – 더 빠른 vECU 통합
- AVL EXCITE™ M 인터페이스 컴포넌트 – 원활한 1D–3D 커플링
- SiL 관련 효율성 향상 기능:
- KPI 기반 DoE 모니터링을 위한 Run-Tab
- 이벤트 기반 테스트를 위한 FMI 3.0 시간 기반 클록
- 자동 모델 연결: 이름 기반 implicit 매핑
- 대용량 MF4 파일 지원
Collaboration Server
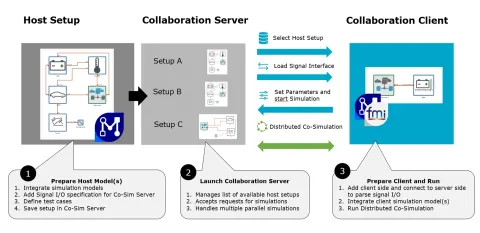
FMU는 시뮬레이션에서 모델 공유에 널리 사용되지만, 리소스나 바이너리 내부에서 모델 세부 정보에 접근할 수 있기 때문에 지적 재산(IP) 유출 위험이 있습니다. Model.CONNECT™ Collaboration Server는 서버에 호스팅된 모델에 연결되는 프록시 클라이언트 FMU를 제공함으로써, IP를 보호하면서도 원활한 코시뮬레이션을 가능하게 합니다. 서버는 OEM 또는 공급사가 호스팅할 수 있으며, 보안 HTTPS 연결을 지원하고, 사용권 해지(revoke) 등 유연한 접근 제어를 제공합니다. 또한, 모델이 너무 복잡해 패키징이 어렵거나 물리 컴포넌트가 포함된 경우에도 협업이 가능하며, 적절한 타임스텝 조건에서 실시간 상호작용도 지원합니다.
FMI 3.0 Layered Standard Virtual Bus (FMI-LS-BUS)
현대 차량은 CAN, LIN, FlexRay, Ethernet 등을 통해 상호 연결된 100개 이상의 ECU(예: ECM, BMS, 컴포트 시스템 등)를 통합합니다. 이러한 복잡한 네트워크를 조기에 검증하기 위해, OEM은 점점 더 많은 가상 ECU(vECU)를 시뮬레이션에 활용하고 있습니다. 이를 위해 FMI 3.0의 Layered Standard for Network Communication(FMI-LS-BUS)는 FMU 간 네트워크 레벨 상호작용을 표준화합니다. Model.CONNECT는 이미 v1.0.0-rc1 초안에 따른 vECU를 지원하고 있습니다.현대 차량은 CAN, LIN, FlexRay, Ethernet 등을 통해 상호 연결된 100개 이상의 ECU(예: ECM, BMS, 컴포트 시스템 등)를 통합합니다. 이러한 복잡한 네트워크를 조기에 검증하기 위해, OEM은 점점 더 많은 가상 ECU(vECU)를 시뮬레이션에 활용하고 있습니다.
이를 위해 FMI 3.0의 Layered Standard for Network Communication(FMI-LS-BUS)는 FMU 간 네트워크 레벨 상호작용을 표준화합니다. Model.CONNECT는 이미 v1.0.0-rc1 초안에 따른 vECU를 지원하고 있습니다.
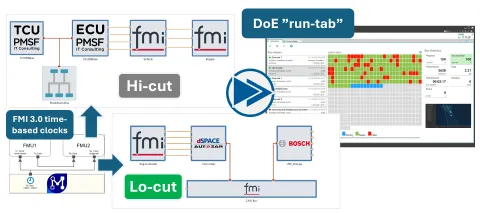
FMI-LS-BUS는 두 가지 추상화 레벨을 정의합니다.
- High Cut (Physical Abstraction Layer):
FMI 3.0 터미널을 사용한 신호/프레임 기반 통신, Model.CONNECT의 Virtual Bus 컴포넌트가 신호, 프레임, 타이밍(클록 포함)을 자동으로 관리, .dbc 또는 arxml 설명 파일을 활용해 여러 vECU를 효율적으로 연결,
신호에 작성자(writer)가 없을 경우 플래그 처리되며, 상수, 테이블, 계측 재생으로 대체 가능 - Low Cut (Network Abstraction Layer):
CAN 중재(arbitration)나 버스 에러 등 프로토콜 효과를 포함한 비트 레벨 통신, 바이너리 Tx/Rx 변수와 클록 동기화를 통해 데이터 교환, Transmit, Confirm, Arbitration Error 등 연산을 통해 상세 버스 거동 시뮬레이션, 버스 부하, 지연, 에러 처리, 우선순위 충돌 등의 분석을 지원,
FMI-LS-BUS는 vECU 네트워크 시뮬레이션의 확장성과 상호운용성을 보장합니다. Model.CONNECT는 두 추상화 레벨을 모두 통합하고 있으며, ASAM에서 발표된 바와 같이 이 새로운 표준을 가장 먼저 구현한 도구 중 하나입니다. 이와 함께 Model.CONNECT는 FMI 3.0 시간 기반 클록을 활용하여 이벤트 기반 SiL 테스트도 지원합니다.
새로운 AVL EXCITE™ M 인터페이스 컴포넌트
새로운 Model.CONNECT™ 릴리스는 전용 모델 인터페이스를 통해 EXCITE M도 지원합니다. 이를 통해 EXCITE M 모델은 FMI 기술을 백그라운드에서 활용하면서 동일 프로세스 내에서 시뮬레이션됩니다.
구성은 매우 간단합니다. 동일 프로젝트 파일 내 EXCITE M 모델을 직접 선택하면, 해당 모델의 모든 포트가 자동으로 노출됩니다.
Release 2022 R2
- Virtual System Development - Concept, Layout and Integration
- Virtual Function Development - Automated and Connected Mobility
- Virtual Battery Development - From Cell to Vehicle
- Virtual Fuel Cell Development - Components and Systems
- Virtual Driveline Development - Transmission and E-Drive
- Virtual ICE Development - Durability and NVH
- Virtual ICE Development - Performance and Emissions
최신 소식을 놓치지 마세요
시뮬레이션 블로그 시리즈를 가장 먼저 만나보세요. 지금 등록하면 유용한 정보를 받아보실 수 있습니다!
최신 소식을 놓치지 마세요.
블로그를 구독하시면 유용한 정보를 받아보실 수 있습니다.