Scenario-Based Testing and Safety Argumentation with AVL SCENIUS™
Published on August 05, 2025 · 3 min read
The industry is undergoing a major shift. Instead of measuring success by the number of driven kilometers, the focus is now on exposing the system to critical traffic situations, those moments when an ADAS or AD function must actively prove that it can react safely.
This is where scenario-based testing for automated driving comes into play. By using well-defined, reproducible scenarios, we can test functions in a targeted, transparent, and scalable way. It supports agile development with techniques like continuous testing. Every time a new software version is released, it’s tested against the same scenarios. That makes it easy to compare test results and spot regressions or improvements in behavior.
Scenario-based testing also plays a key role in validation. This is the stage where SOTIF validation for ADAS functions becomes crucial. The goal is to identify critical cases, unknown or unexpected situations the system hasn’t yet encountered, and verify that the vehicle can handle them safely.
In short, scenario-based testing is:
More efficient: You perform more meaningful tests by focusing on relevant, safety-critical moments.
Reproducible: Test cases work in simulation—and can be repeated in real-world testing.
Parametrizable: You can vary conditions like starting position, speed, and distance to make scenarios easier or harder.
Different teams often have varying definitions. At AVL, we follow a definition supported by European research projects like PEGASUS and ENABLE-S3. Scenarios are described in multiple layers:
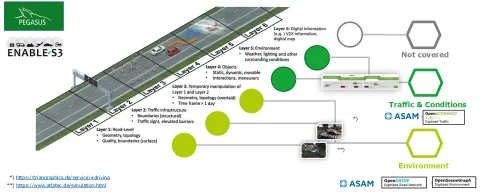
Static layer: Road layouts, signs, infrastructure, construction zones.
Dynamic layer: Involved actors, vehicle behavior, maneuvers.
Environmental layer: Weather, time of day, road conditions.
Digital infrastructure: V2X communication and system messages.
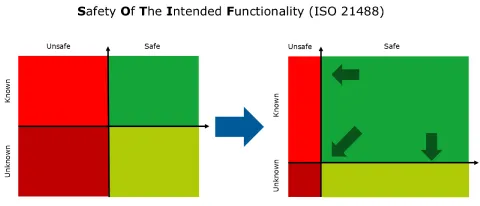
To systematically validate the safety of ADAS/AD functions, many teams rely on the SOTIF methodology (ISO 21448). The main idea is to categorize traffic situations that can be encountered on the roads as safe/unsafe and known/unknown. In the process, safe and known situations should be increased, while unknown and unsafe situations are decreased. They are dangerous because it is not clear how the ADAS/AD system will react to them.
The challenge lies in covering the vast landscape of possible traffic situations. There are different methods usually applied to reach this goal.
One of them is a multi-pillar approach for the SOTIF validation across test environments. These environments include:
- Simulation
- Hardware-in-the-loop (HiL)
- Driver simulators
- Vehicle-in-the-loop (ViL)
- Proving grounds
- Public roads
The key to success is to find the right mix between those test environments. Each of these environments serves a purpose. The key is to orchestrate them into one cohesive, traceable workflow. That is what AVL SCENIUS™ was built for.
SCENIUS is a comprehensive toolchain designed to streamline scenario-based ADAS/AD validations.
It provides centralized scenario management through the Scenario Data Manager, enabling users to import, update, and manage scenarios in a unified database for seamless collaboration. Supporting ASAM OpenSCENARIO® standards, SCENIUS ensures compatibility with industry norms, allowing users to design, edit, and verify traffic scenarios efficiently.
With scalable execution capabilities, scenarios can be run in cluster or cloud environments using AVL Scenario Simulator™, facilitating large-scale virtual testing. The intuitive AVL Scenario Designer™ simplifies scenario creation and verification, offering tools to import road networks, actors, and dynamic behaviors while exporting scenarios in OpenSCENARIO® format.
Additionally, SCENIUS enhances productivity with comprehensive data handling, flexible scenario exporting options, and real-time monitoring and analysis features, empowering users to validate ADAS/AD systems with confidence and precision.
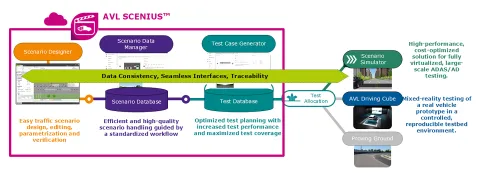
The toolchain consists of:
Scenario Designer: Build and edit ADAS scenario simulation tools based on ASAM OpenSCENARIO® and OpenDRIVE with an intuitive UI. It provides intuitive tools for creating and verifying scenarios, including importing road networks, adding dynamic behaviors, and exporting scenarios in OpenSCENARIO® format. This ensures that scenarios are robust and ready for simulation
Scenario Data Manager: Organize and manage all test scenarios in one central database. Ensure consistency, collaboration, and traceability across teams, ISO 26262 certified.
Test Case Generator: Define smart test strategies and reduce test effort by automating parameter variations. Interfaces are available to link with simulation, ViL, and proving grounds.
- Scenario Simulator: A high-performance, cost-efficient simulation platform for large-scale virtual testing of ADAS/AD functions.
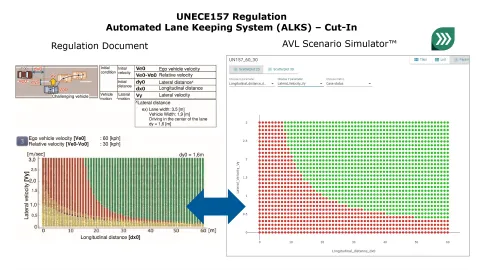
To verify an ALKS model’s compliance with industry standards using SCENIUS, the testing process begins in the Scenario Designer. In this step, traffic scenarios are created and parameterized according to the ASAM OpenSCENARIO® standard, incorporating elements such as vehicle dynamics, lane configurations, and environmental conditions.
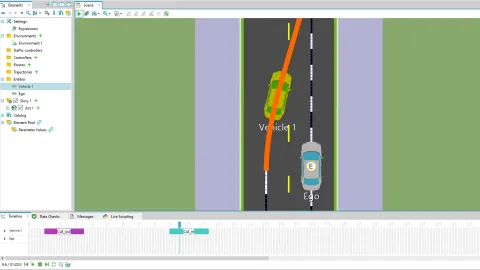
The ALKS model, which typically comprises Adaptive Cruise Control, a Lane Keeping Assistance Controller, radar sensors based on the Open Simulation Interface, and a perception module, is then integrated into the Scenario Simulator. This integration enables closed-loop simulations to thoroughly evaluate system performance across a range of driving conditions.
During the simulation, key performance indicators such as lane-keeping accuracy, vehicle yaw rate, and distance to lane center are continuously monitored and analyzed using SCENIUS. At the conclusion of testing, detailed reports are generated, summarizing the test results and clearly demonstrating compliance with ALKS standards.
Watch the Hands-on Workflow Demonstration of AVL SCENIUS™ to learn about this workflow in detail.
Stay tuned
Don't miss the Simulation blog series. Sign up today and stay informed!
Read More About This Topic
Scenario-based testing is a crucial aspect of the development process for advanced driver assistance systems and autonomous driving functions. We will show you the workflow for creating and parameterizing a set of automated lane keeping system scenarios using Scenario Designer.

Simulation is no longer just a development shortcut, it’s a critical pillar of autonomous vehicle safety. But as simulation becomes more central to validation and certification, one question looms large: Can we trust the results?

Testing millions of scenarios in different test environments provides a significant hurdle in ADAS and AD- development. In this free, 60-minute webinar, AVL's Heiko Scharke, Josko Balic, and Florian Klueck present the company's to toolchain for an optimized scenario-based workflow - AVL SCENIUS™.
Stay tuned
Subscribe and don‘t miss new posts.