
Beyond pure simulation, cyber-physical test methods play an important role. The AVL DRIVINGCUBE combines both, simulation and ready-to-drive vehicles on a chassis dynamometer or on a powertrain testbed. The experience gained in a large number of research and contracted projects was carefully incorporated into the design of the DRIVINGCUBE. It aims to speed up the validation and approval process of ADAS and AD systems by using fully automated, scenario-based testing increasing test coverage and reducing testing effort. Its holistic sensor stimulation and full range steering ability brings the proving ground to the testbed.

Together with Rohde & Schwarz and Stähle we designed completely new testing opportunities. Based on these strategic collaborations, we can now perform steering on the test-bed and radar-enabled and GNSS-based testing and validation under safe and reproducible conditions at vehicle level. With real built-in sensors being artificially simulated, no modifications of the vehicle are required. The AVL DRIVINGCUBE paves a new way for the acceleration of the validation and approval process of ADAS and AD systems. You can also benefit from our cutting-edge testing services, exclusive partner network and deep engagement with legal bodies and authorities
| Item | Description |
|
Radar Target Stimulator |
Frequency 76-81GHz, Bandwidth: 4GHz, |
| Dynamic Steering Force Emulator |
Actuation Speed: 250mm/s, |
| Camera Stimulator |
Different solutions with monitors and/or projection onto canvas depending on the vehicle camera system |
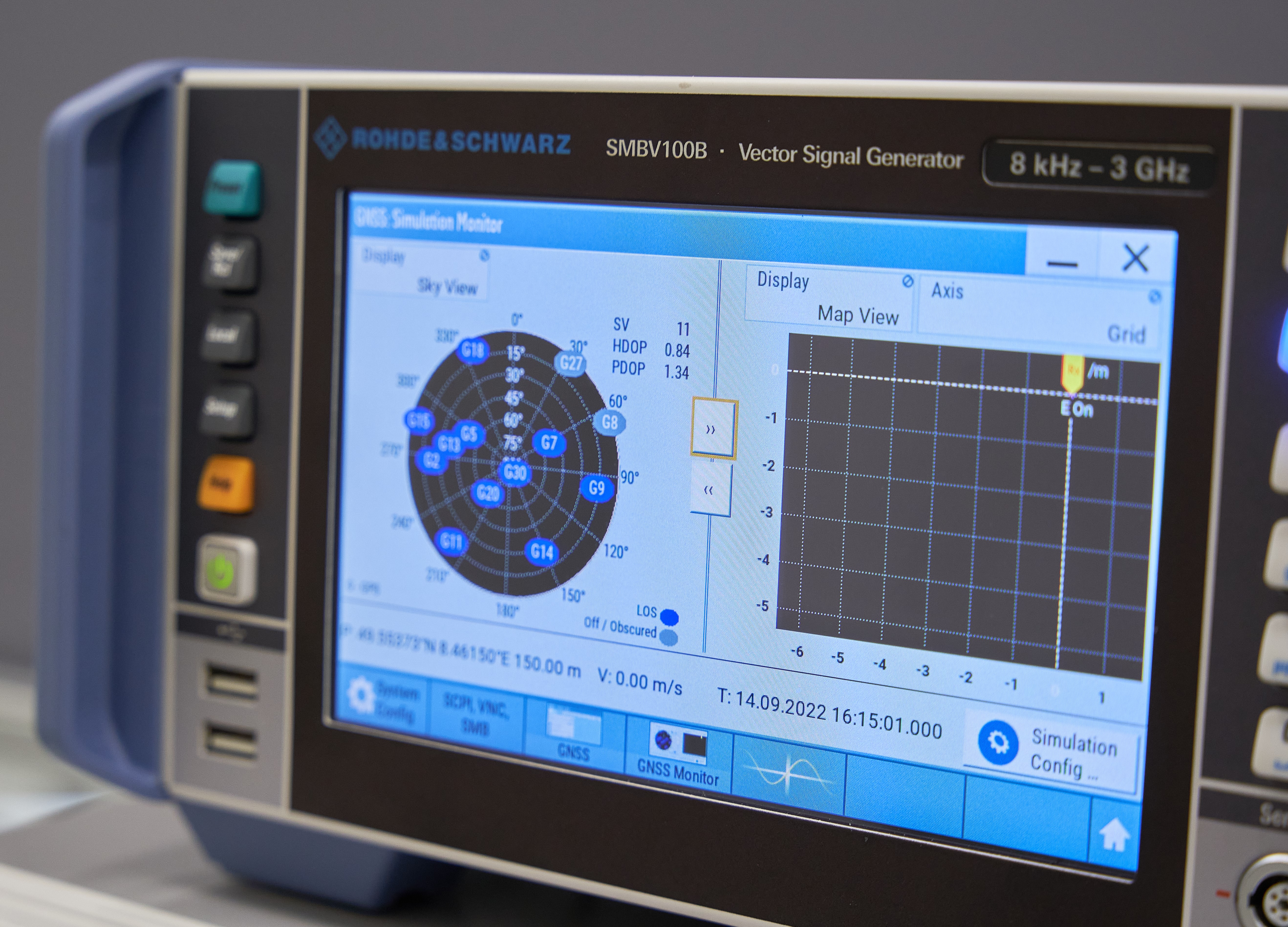
| GNSS Stimulator |
Real time satellite model, |
Increased Test Coverage
for ADAS and AD with reduced test effort
Test Execution on Vehicle Level
under highly reproducible conditions
Efficient Repetition and Variations
of a range of scenarios and vehicle variants
Safe Operating Conditions
especially during critical driving scenarios
Easy Upgrade
of existing chassis dynamometers and powertrain testbeds
New: AVL Integration Core™
This modular testing platform integrates powerful hardware with an open, flexible software suite to enable comprehensive validation of ADAS/AD systems. It supports seamless testing across Software-in-the-Loop (SiL), Hardware-in-the-Loop (HiL), and Vehicle-in-the-Loop (ViL) environments, making it ideal for everything from early-stage simulation to full system integration and scenario-based testing.

Dynamic Steering Force Emulator
This module is a retrofit extension to vehicles to allow a full range of steering capability with accurate force feedback from the virtual road. When attached to the vehicle, it is used to validate ADAS/AD functions that require realistic steering like active Lane Keeping Systems.

Radar Stimulator
The radar generates independently moving and realistic targets for automotive radar sensors during the test drive - without mechanically moving parts and with minimum footprint. A wide range of radar sensor types can be stimulated over-the-air.

Camera stimulator
The camera stimulator allows the easy over-the-air stimulation of automotive cameras required for the validation of ADAS/AD function testing. No access to the vehicle camera is required.

GNSS Stimulator
It allows the dynamic stimulation of global navigation satellite system receivers with all possible positions on earth, while the vehicle is driving on a testbed. It supports standards like GPS, GLONASS, BEIDOU and GALILEO.
The AVL DRIVINGCUBE™ at the TU Berlin has already proven itself as a highly efficient test environment for the analysis of electrified and automated vehicles in several research and industry projects.
– Prof. Dr. – Ing. Steffen Müller, Head of Department Automotive Engineering at the Technical University Berlin
SCENIUS is a holistic solution for scenario-based ADAS and AD safety testing and validation.
Highly accurate dynamic environment-measurement for ADAS/AD validation.
Boost the efficiency of your NCAP and homologation testing: now and in the future.
Fully exploit the value of your real-word data with the AVL ADAS/AD Big Data and Analytics Platform™.
How to master complex ADAS/AD function testing to get vehicles on the road faster.

A new way to speed up the validation and approval process of ADAS/AD systems.

AVL and Rohde&Schwarz have intensified their collaboration with the integration of a Rohde&Schwarz radar test system into the AVL DRIVINGCUBE™.

The integration of ADAS/AD systems into vehicles moves forward.But what needs to be considered when developing and validating these systems? You will receive answers to these questions and gain insights into application examples in this webinar!
![AVL DRIVING CUBE[2]](/sites/default/files/styles/landscape_small/public/pressrelease/Company/PressReleases/Press%20Releases%202020/AVL%20DRIVING%20CUBE%5B2%5D_0.jpg.webp?h=b99b46e9&itok=bFCuIasG "AVL DRIVING CUBE[2]")

Ready to combine the best of two worlds?The demand for ADAS/AD testing and validation in simulation and real world is increasing rapidly due to the growing number of ADAS/AD functions and vehicle variants.